Виды
Скаты, наряду с акулами, являющимися им близкими родственниками – старейшие из животных, населяющих водное царство. Относятся они к хрящевым рыбам, надотряду пластиножаберных, насчитывающим 5 отрядов, а также 15 семейств.
Учеными выделяются такие виды скатов:
- хвостоколообразные;
- электрические;
- скатообразные;
- пилорылообразные.
Эти существа, насчитывающие 69 разновидностей, группируются в такие семейства:
- орляковые. Это крупные существа, которые обитают в пелагической области. Встретить их можно чаще всего в открытых водах морей. Предпочитают тропические воды. Передвигаются волнообразно взмахивая крыльями-плавниками;
- нарциновые. Придонные, размеренные существа. Они могут выработать ток не мощнее 40 вольт. Встречаются в широтах умеренного климата, обитают в устьях рек, песчаных бухтах и у рифов;
- гнюсовые. Имеется сорок видов. Передвигаются медлительно, часто просто лежат на дне, закопавшись в песок. Когда рядом проплывает добыча, скат оглушает ее и поедает;
- пилорылые. Существует 7 видов. Имеют акулий хвост и определенное внешнее сходство с последними. Предпочитают тропические широты. Их основной рацион составляют стайные рыбки. Они врезаются в стаю и орудуют пилой как мечем, после чего подбирают остатки со дна. Не опасны для человека;
- хвостоколы. Тело этих рыб полностью покрыто шипами. На конце хвоста есть секреты, выделяющие яд, отчего удар хвостом может быть смертельно опасным. Проникнув в тело, яд провоцирует тахикардию, снижает давление, вызывает рвоту и приводит к параличу;
- гитарные. Эта разновидность имеет акулью внешность, однако наличие жабер делает их скатами. Передвижение происходит при помощи хвоста, по-акульи. В рацион входят моллюски и маленькая рыба. Свою добычу атакуют сверху, придавливая ко дну.

Зарубежные беспилотники
Одним из направлений в развитии БПЛА является уменьшение их габаритов без существенного ущерба для технических характеристик. Норвежская разработала микро дрон ПД-100 Блэк Хорнет вертолетного типа.

Данный беспилотник может работать около четверти часа на расстоянии до 1 км. Этот робот применяется в качестве индивидуального разведывательного средства солдата и оснащен тремя видеокамерами. Используется некоторыми регулярными подразделениями США в Афганистане с 2012 года.
| ТТХ Блэк Хорнет | |
| Длина | 100 мм. |
| Вес | 120 гр. |
| Дальность полета | 1000 м. |
| Время работы | 25 мин. |
| Оснащение | 3 оптические видеокамеры с разрешением в 3 МП |
Самый распространенный беспилотник армии США — РКью-11 Рэйвен. Его запуск производится с руки солдата и для его приземления не требуется специальной площадки, он может летать как в автоматическом режиме, так и находясь под управлением оператора.

Этот легкий беспилотник солдаты США применяют при решении задач ближней разведки на уровне роты.
| ТТХ РКью-11 Рэйвен | |
| Длина, мм | 790 |
| Вес, гр. | 1800 |
| Размах крыла, м | 1.5 |
| Дальность полета, км | до 5 |
| Силовая установка | Электродвигатель |
| Время работы, мин | 45…60 |
| Оснащение | цифровая видеокамера дневного обзора, камера ночного видения |
Более тяжелые БПЛА американской армии представляют РКью-7 Шэдоу и РКью-5 Хантер. Оба образца предназначены для производства разведки местности на уровне бригады.

Беспрерывное время работы в воздухе этих беспилотников существенно отличается от более легких образцов. Существуют множественные их модификации, некоторые из которых включают в себя функции подвешивания на них небольших управляемых бомб массой до 5.4 кг.
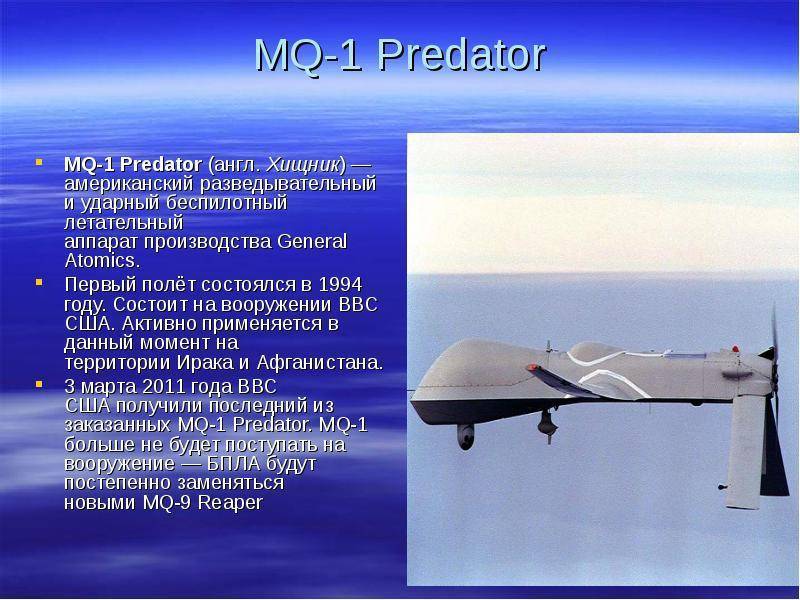
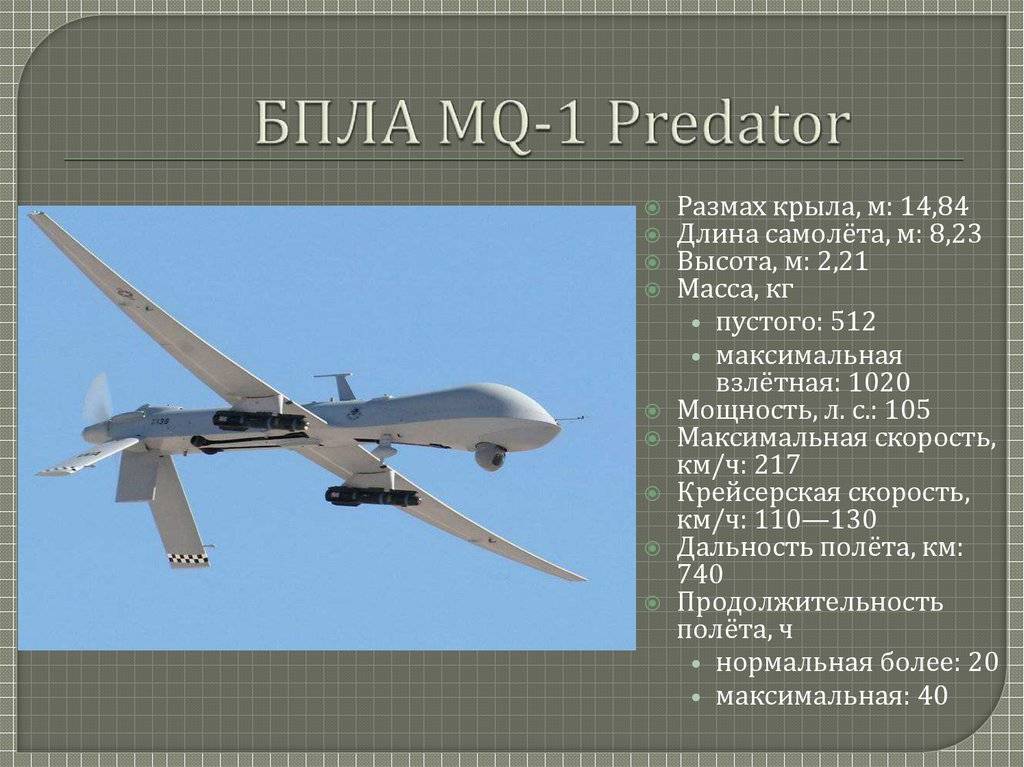
МКью-1 Предатор — это самый известный американский дрон. Изначально его основной задачей, как и у многих других образцов, была разведка местности. Но вскоре, в 2000 году, производители внесли в его конструкцию ряд модификаций, позволяющих ему выполнять боевые задачи, связанные с непосредственным уничтожением целей.

Помимо подвешиваемых ракет (Хеллфайр-С, созданные специально для этого беспилотника в 2001 году), на борту робота установлены три видеокамеры, инфракрасная система и своя бортовая радиолокационная станция. Сейчас существуют несколько модификаций МКью-1 Предатора для выполнения задач самого различного характера.
В 2007 году появился еще один ударный БПЛА—американский МКью-9 Рипер. По сравнению МКью-1 Предатор его показатель продолжительности полета был намного выше, а также помимо ракет мог нести на борту управляемые авиабомбы и имел более современную радиоэлектронику.
| Вид БПЛА | МКью-1 Предатор | МКью-9 Рипер |
| Длина, м | 8.5 | 11 |
| Скорость, км/ч | до 215 | до 400 |
| Вес, кг | 1030 | 4800 |
| Размах крыла, м | 15 | 20 |
| Дальность полета, км | 750 | 5900 |
| Силовая установка, двигатель | поршневой | турбовинтовой |
| Время работы, ч | до 40 | 16-28 |
| Ракетная/бомбовая нагрузка | до 4-х ракет Хеллфайр-С | бомбы до 1700 кг |
| Практический потолок, км | 7.9 | 15 |
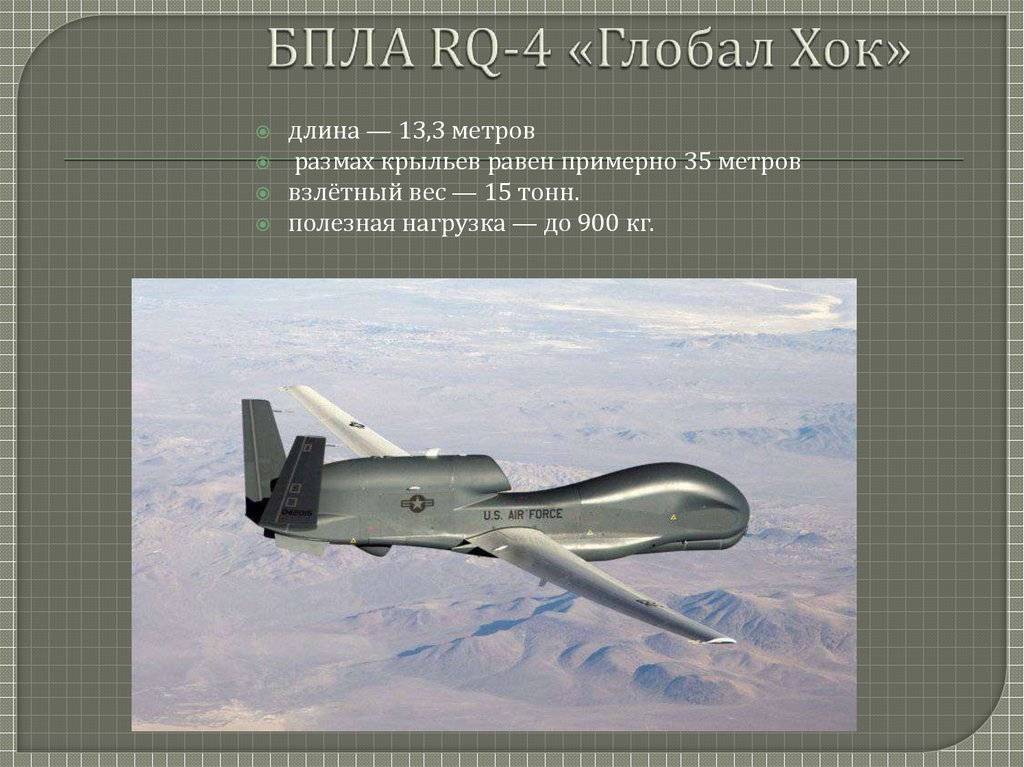
Самым большим БПЛА в мире по праву считается РКью-4 Глобал Хоук. В 1998 году он впервые поднялся в воздух и по сей день выполняет задачи разведывательного характера.
Этот дрон — первый в истории робот, который может использовать воздушное пространство и воздушные коридоры США без разрешения органа управления воздушным движением.
| ТТХ РКью-4 Глобал Хоук | |
| Длина, м | 13.3 |
| Размах крыла, м | 35 |
| Дальность полета, км | 22 000 |
| Вес, т | 15 |
| Силовая установка | Турбовентиляторный двигатель |
| Оснащение | ИК-система, комплекс для веденияразведки, РЛК-комплекс |
| Время работы, ч | 36 |
| Практический потолок, км | 18 |
Комплекс беспилотников “Молния”
“Молния” — беспилотники группового применения, разрабатываемые той же компанией “Кронштадт”. Они относятся к классу легких БПЛА, По словам директора компании Сергея Богатикова, дроны заставят “захлебнуться” ПВО противника. Надо сказать, что это слово наиболее точно описывает принцип работы дронов, так как они не наносят ударов по зенитным установкам.
Характеристики и принцип действия БПЛА “Молния”
Молния представляет собой компактный дрон, длина которого составляет всего 1,5 метров, а размах крыльев — 1,2 метра. Крылья расправляются после запуска БПЛА. Полезная нагрузка аппарата не превышает 5-7 кг. При этом он обладает достаточно высокой скоростью, которая достигает 700-800 км/ч благодаря турбореактивной силовой установке.

БПЛА «Молния» расправляет крылья при запуске
В результате такой компактности, БПЛА может транспортироваться самыми разными самолетами, в том числе его можно уместить на борту Су-57. Старт дронов осуществляется с носителя, а не с земли. О способе посадки информации пока нет.
Предназначение БПЛА “Молния”
В отличие от “Грома”, БПЛА “Молния” не ударный дрон, не смотря на то, что основная его задача — это борьба с ПВО. Принцип действия роя дронов предельно простой, и в то же время эффективный. Современные средства ПВО способны сбить только определенное количество воздушных целей, к примеру, 100. Если же происходит перенасыщение каналов, то есть ПВО видит не 100, а 1000 целей, системы обязательно дает сбой, то есть “захлебывается”.
Кроме того, дроны могут выполнять и другие задачи. Благодаря постоянному обмену данными между БПЛА и управляющим самолетом, имеется возможность быстро и гибко реагировать на те или иные факторы. К примеру, если один из беспилотников будет сбит, задачи между ними могут перераспределяться в автоматическом режиме.
По задумке рой может осуществлять разведку, выполнять радиоэлектронную борьбу или даже указывать цели. При оснащении дронов боеприпасами, их можно будет использовать в качестве беспилотников-камикадзе, аналогичных “Куб” и “Ланцет”.
К сожалению, никакой информации относительно испытаний данных БПЛА пока нет. Поэтому вряд ли стоит рассчитывать, что они начнут поступать на вооружение в 2022 году.
Тяжёлый «Охотник»
С-70 «Охотник» разработки ОКБ Сухого — первый тяжёлый ударный БПЛА отечественного производства. Его создание началось в 2012 году. Первый макет аппарата для проведения наземных испытаний был создан в 2014-м.
Впервые опытный образец «Охотника» был представлен в 2018 году, когда БПЛА вышел на завершающий этап наземных испытаний. Позднее ТАСС со ссылкой на источники в ОПК сообщил, что «Охотник» в ходе этих испытаний совершил первую пробежку по взлётно-посадочной полосе Новосибирского авиационного завода, достигнув скорости 200 км/ч. При этом, отмечал источник, руление, разбег, набор скорости и остановка в конце полосы были выполнены «Охотником» полностью автономно.

- С-70 «Охотник»
Первый испытательный полёт БПЛА совершил в августе 2019 года. Он продолжался более 20 минут — «Охотник» под управлением оператора выполнил несколько облётов аэродрома на высоте около 600 м и совершил успешную посадку.





Также по теме

Новые возможности: какими будут российские ударные и разведывательные БПЛА «Альтиус» и «Форпост»
Минобороны России и Уральский завод гражданской авиации (УЗГА) заключили контракт на создание разведывательно-ударного беспилотника…
Позднее, в конце сентября 2019 года, Минобороны РФ сообщило о первом совместном полёте «Охотника» и истребителя пятого поколения Су-57. В ходе этого испытания БПЛА в автоматизированном режиме отработал взаимодействие с самолётом-лидером по расширению радиолокационного поля истребителя, а также целеуказания для применения средств поражения большой дальности без захода Су-57 в зону условного противодействия ПВО.
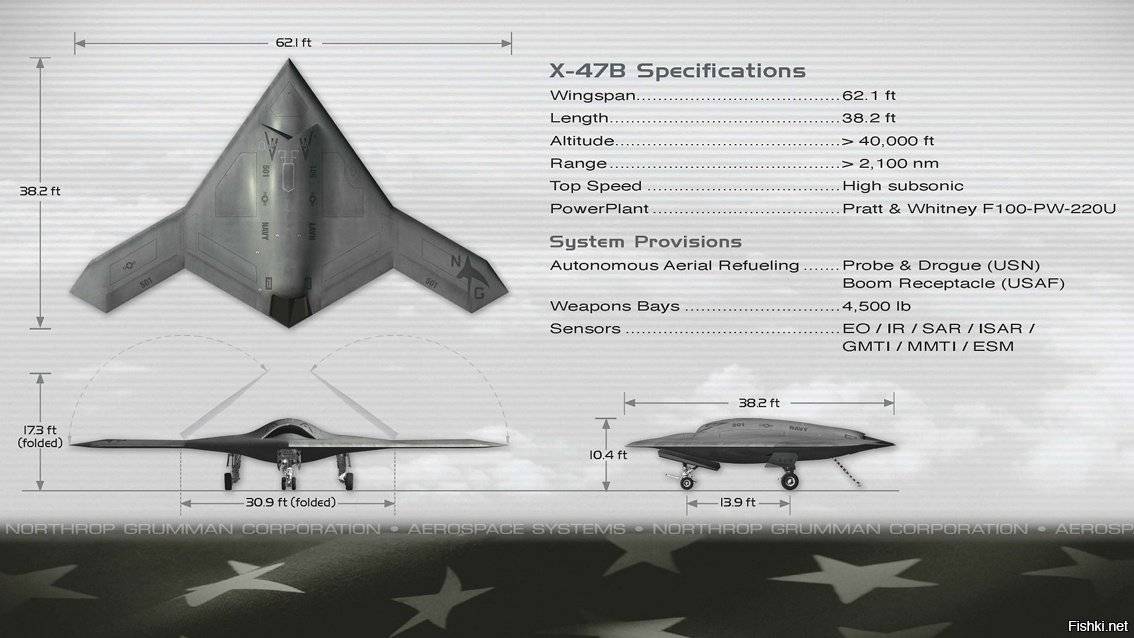
«Охотник» выполнен по схеме «летающее крыло». Внешне он напоминает уменьшенные версии американских бомбардировщика B-2 Spirit и БПЛА Northrop Grumman X-47B. Тактико-технические характеристики «Охотника» не раскрываются.
Согласно данным из открытых источников, его максимальная взлётная масса составляет 20 т, радиус действия — 3,5 тыс. км, максимальная скорость — около 1000 км/ч, высота полёта — до 10,5 км. Без дозаправки БПЛА сможет находиться в воздухе более суток.
Разработка Россией нового тяжёлого беспилотника привлекла внимание и западного экспертного сообщества. Так, американский военно-политический портал The National Interest в своём материале «Встречайте: российский тяжёлый ударный стелс-БПЛА «Охотник» отмечал перспективы использования этих машин в связке с истребителями
Эксперты The National Interest отмечали, что эта технология может существенно снизить время отклика благодаря установлению прямой связи или обеспечения командования и контроля между воздушными платформами, тем самым исключая необходимость передавать сигнал через наземную станцию.
«Это расширит возможности для рекогносцировки и, что ещё более важно, может позволить пилоту истребителя пятого поколения работать на безопасном расстоянии от зоны поражения, командуя, управляя и проводя атаки на передовой тяжеловооружённым БПЛА. «Охотник» может действовать и наносить удары в зонах заметно повышенной опасности, хорошо защищённых летательными аппаратами и средствами противовоздушной обороны», — пишет американское издание
Куб
Группа компаний ZALA AERO из концерта “Калашников” еще в 2019 году представила первую версию своего бесшумного высокоточного БПЛА со скрытым запуском. Основной функционал беспилотник – пикирование на цель из верхней полусферы после непродолжительного (примерно 30 минут) барражирования и ведения объекта атаки. Основная цель таких атак – танки, броня которых в башне минимальна в вертикальной проекции по сравнению с остальными проекциями. Пикирующая атака “Куб” позволяет пробивать такие башни. Координаты цели могут задаваться как вручную, так и посредством изображения. Особый интерес вызывает режим роя, когда несколько беспилотников следуют за ведущим БПЛА.
“Куб” в размахе крыльев достигает 1,2 м и, обладая весом в 3 кг, набирает скорость до 130 км/ч.
https://youtube.com/watch?v=dBMHKDtemu0
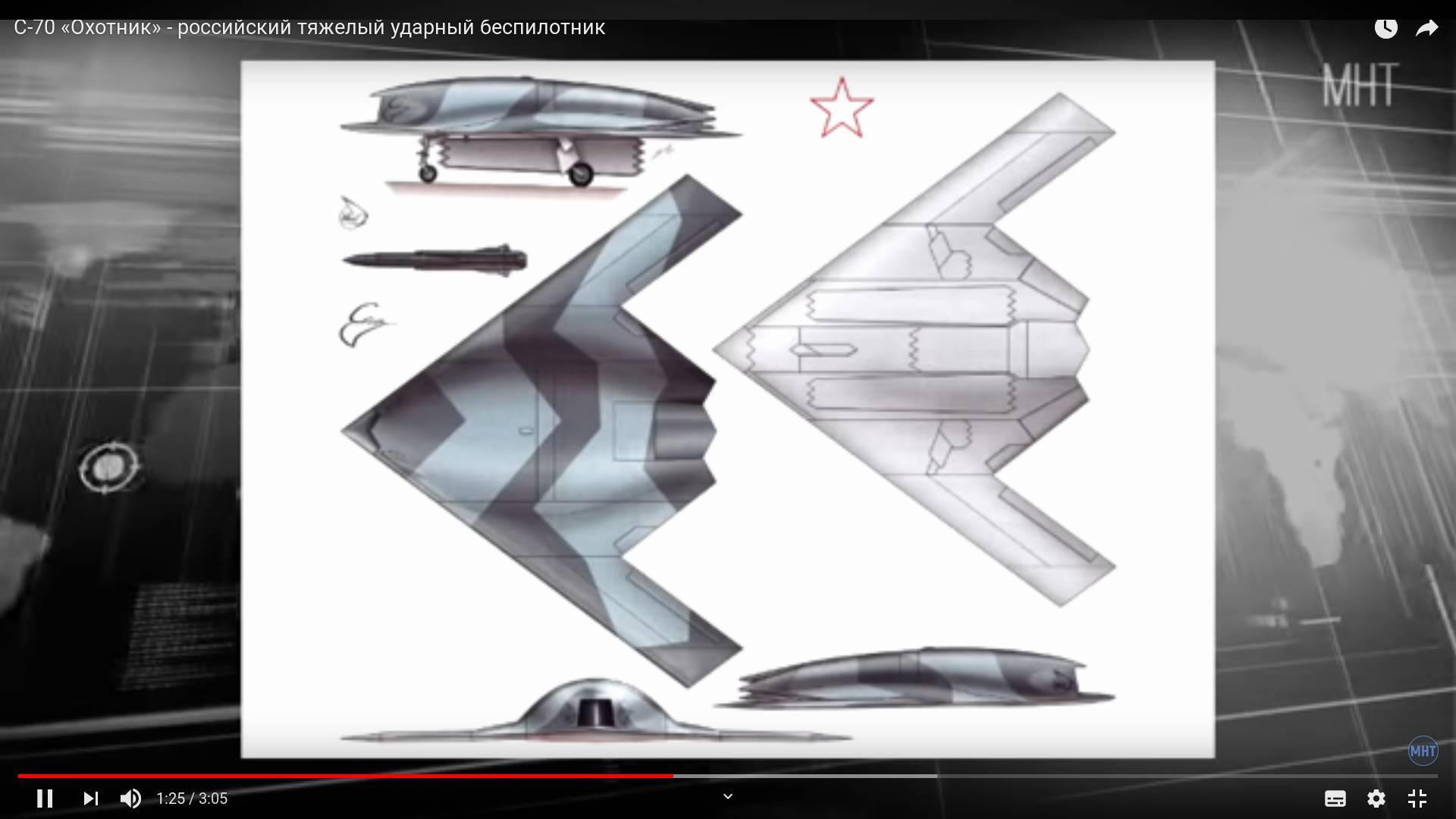
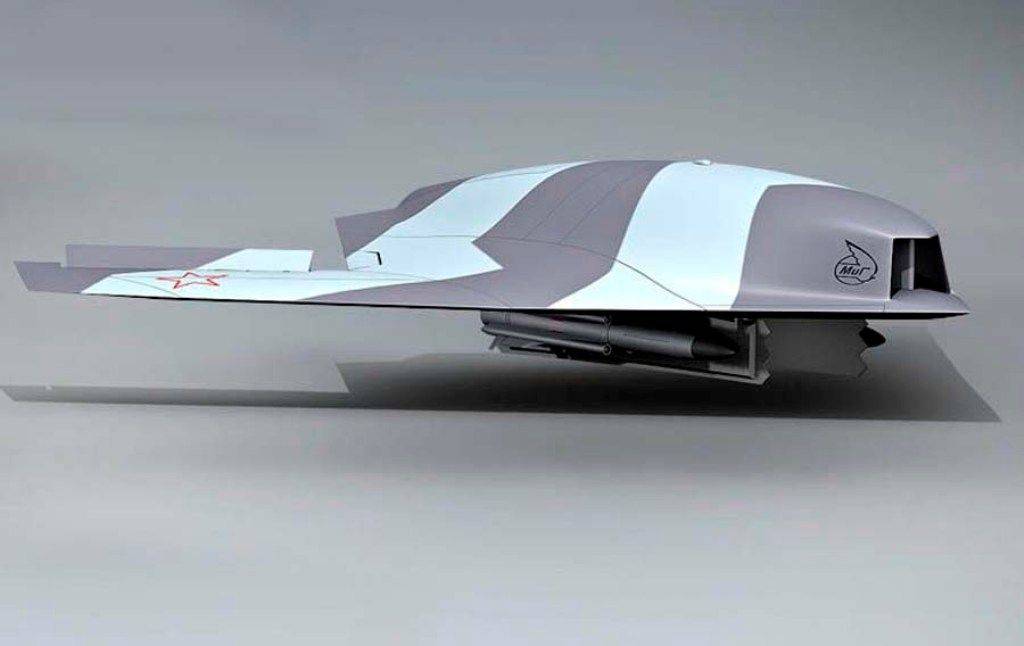
Новый шанс для БПЛА «Скат»

Российская армия располагает большим числом беспилотных летательных аппаратов разных моделей, но изделия тяжелого класса на вооружении пока отсутствуют. Впрочем, уже принимаются необходимые меры, и в ближайшем будущем парк армейской техники может пополниться новыми образцами с требуемыми характеристиками. Не так давно новый шанс поступить на вооружение получил уже известный разведывательно-ударный БПЛА «Скат». После нескольких лет неопределенности разработка проекта продолжена.
О возобновлении работ по проекту с шифром «Скат» стало известно несколько дней назад. 11 сентября информагентство ТАСС со ссылкой на источник в оборонной промышленности сообщило о продолжении работ по сравнительно старому проекту. Утверждается, что Российская самолетостроительная корпорация «МиГ» решила продолжить разработку «Ската». В течение нескольких следующих лет планируется создать опытный образец такой машины. При этом министерство обороны проявляет к проекту определенный интерес.
Также ТАСС попыталось получить информацию от самой РСК «МиГ», но та не стала раскрывать наиболее интересные данные. Указывается, что корпорация напомнила о своих работах в области беспилотных летательных аппаратов, проводимых в последние годы. При этом она не стала подтверждать сведения о конкретных разработках, представляющих наибольший интерес в контексте последних новостей.
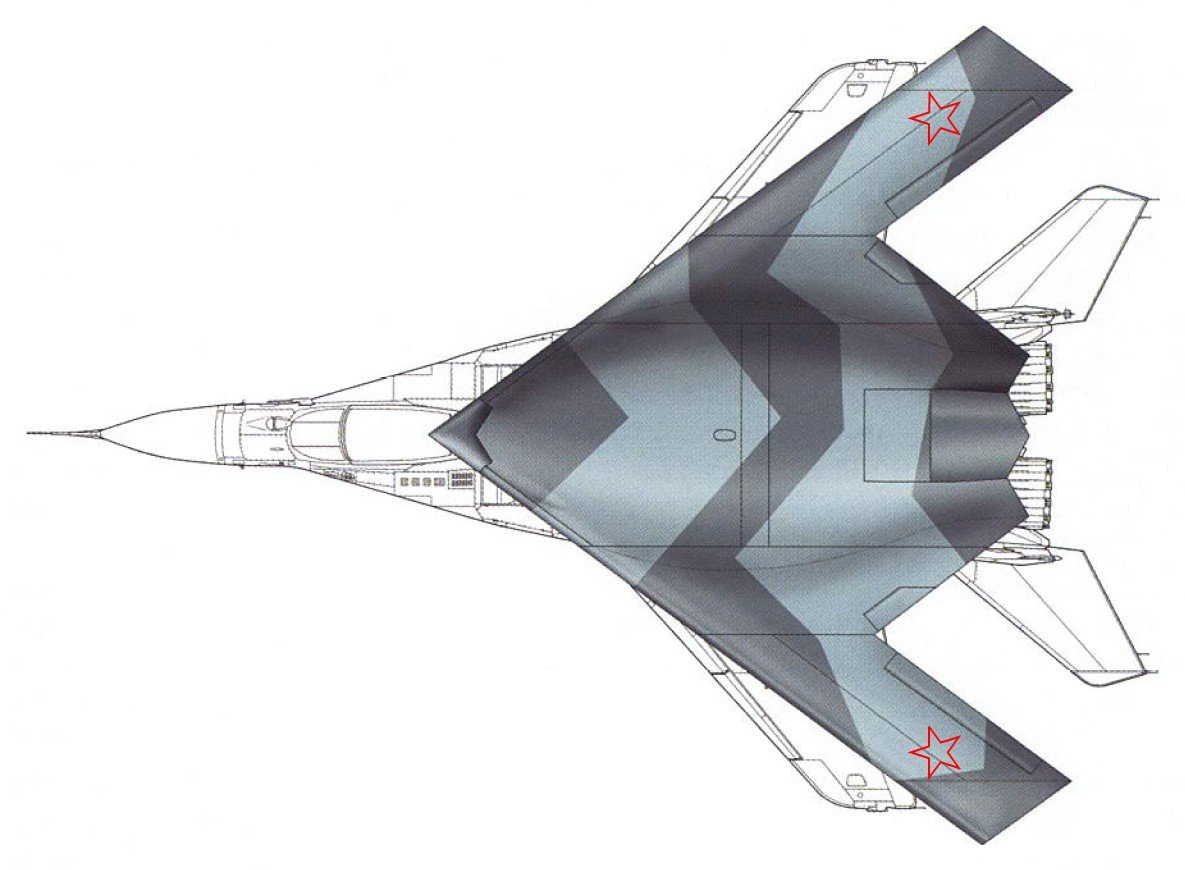
Необходимо отметить, что проект БПЛА «Скат» давно не является новинкой и хорошо известен общественности
В свое время этот беспилотник привлек внимание и стал поводом для самых смелых и оптимистичных оценок. Тем не менее, выполнить все планы по созданию и развитию этого образца не удалось
Направление тяжелых БПЛА пришлось развивать при помощи других проектов, и желаемые результаты до сих пор не получены.
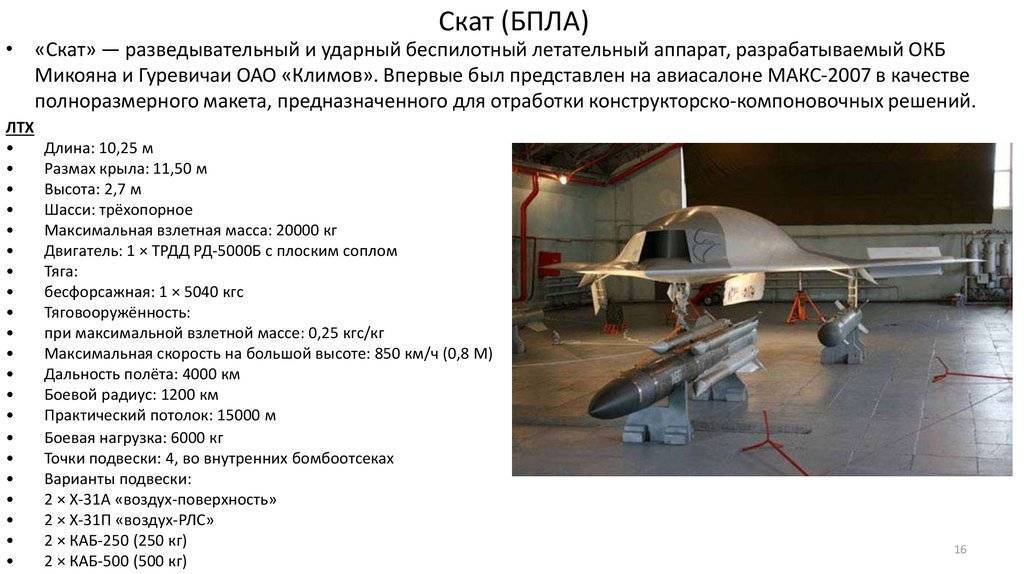
Согласно информации прошлых лет, разработка проекта с шифром «Скат» началась в 2005 году по инициативе РСК «МиГ». Однако в первые годы проект оставался секретным, и никакая информация о нем не публиковалась. Впервые о «Скате» рассказали в ходе аэрокосмического салона МАКС-2007, примерно через два года после старта работ. Разрешение на первый публичный показ беспилотника было получено уже в день открытия салона, и поэтому макет «Ската» демонстрировался не на выставочной площадке, а в одном из цехов организации-разработчика.
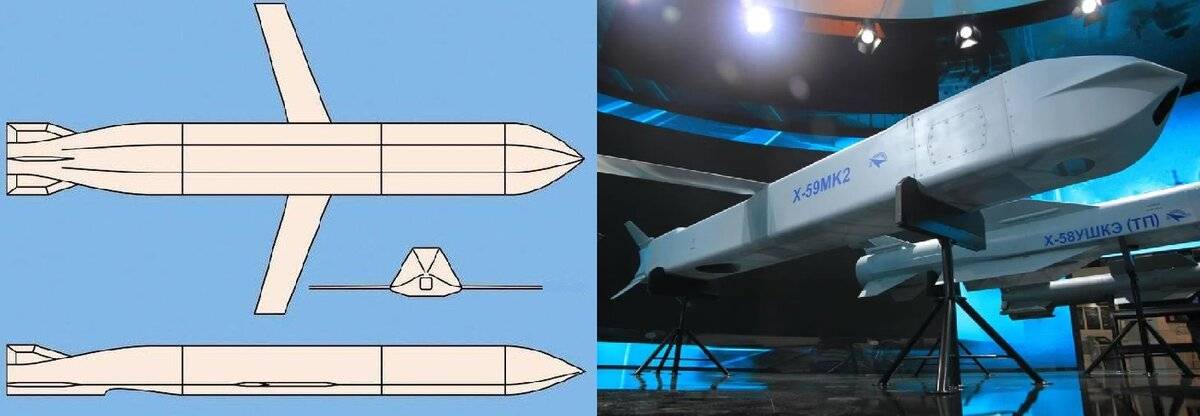
Экспонатом выставки сделали макет будущего БПЛА. Утверждалось, что это изделие предназначается для отработки конструкторских и компоновочных решений. Вместе с макетом показали некоторые рекламные материалы. Кроме того, с ним демонстрировались некоторые авиационные средства поражения, которые планировалось включать в боекомплект
На тот момент российская авиационная промышленность только осваивала современную сферу беспилотных летательных аппаратов, и потому макет тяжелого разведывательно-ударного БПЛА привлек внимание общественности и специалистов
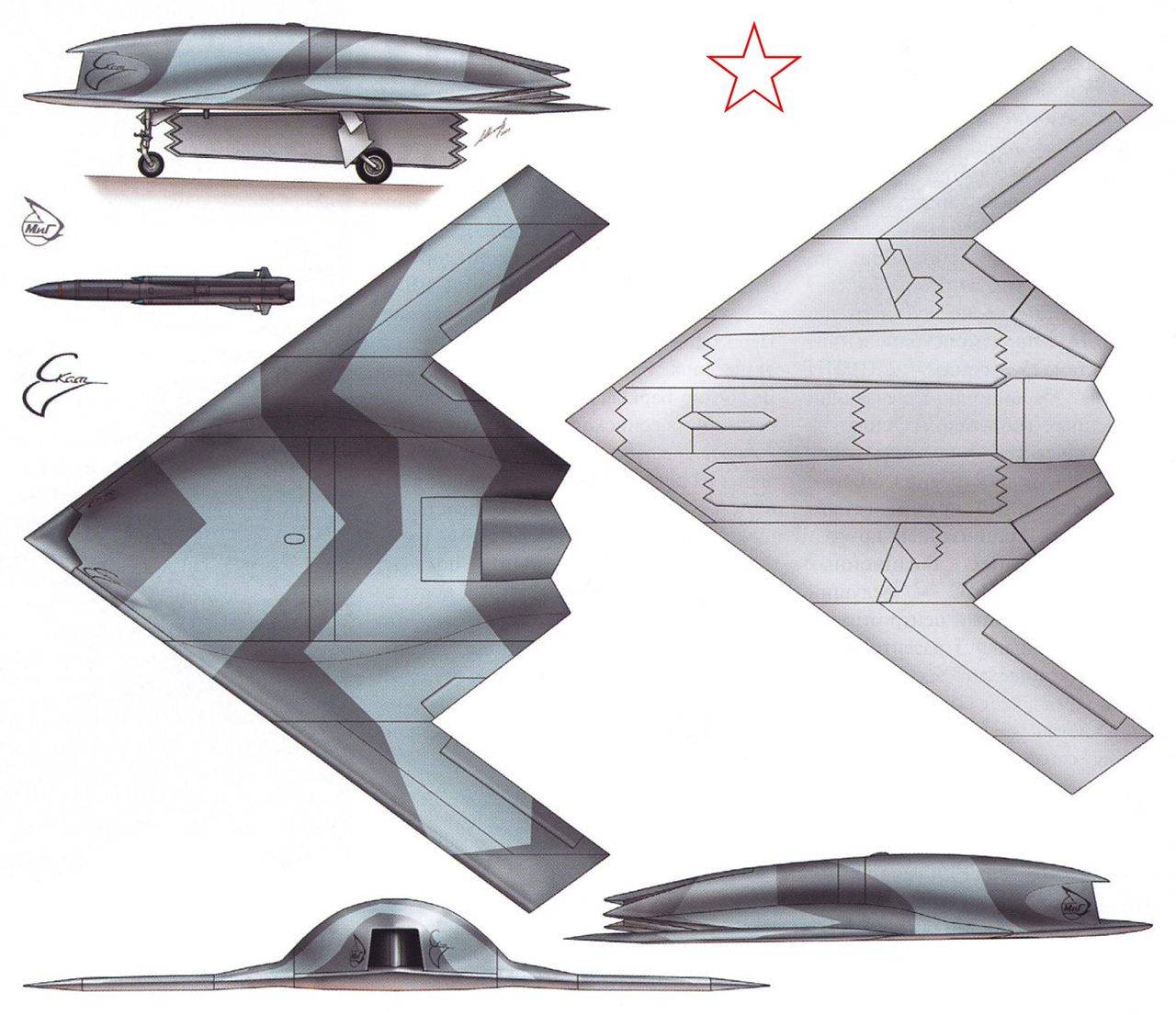
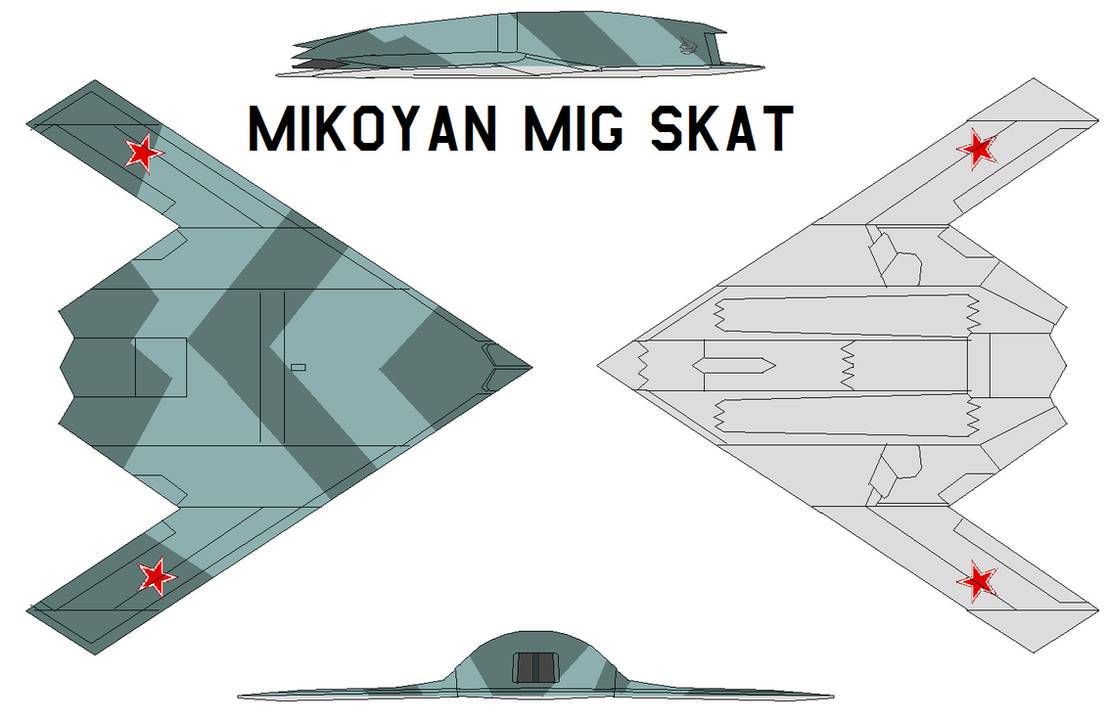
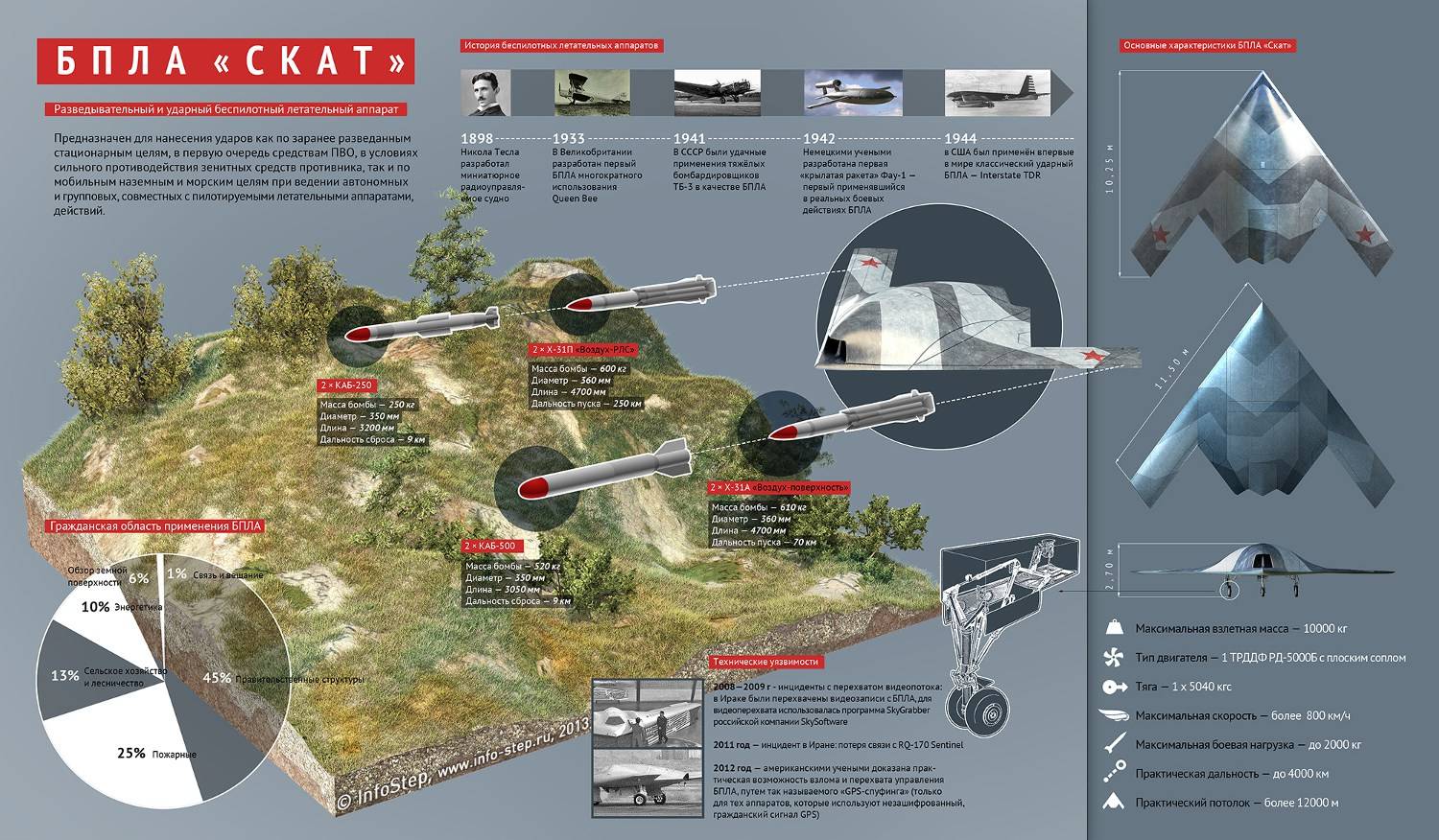
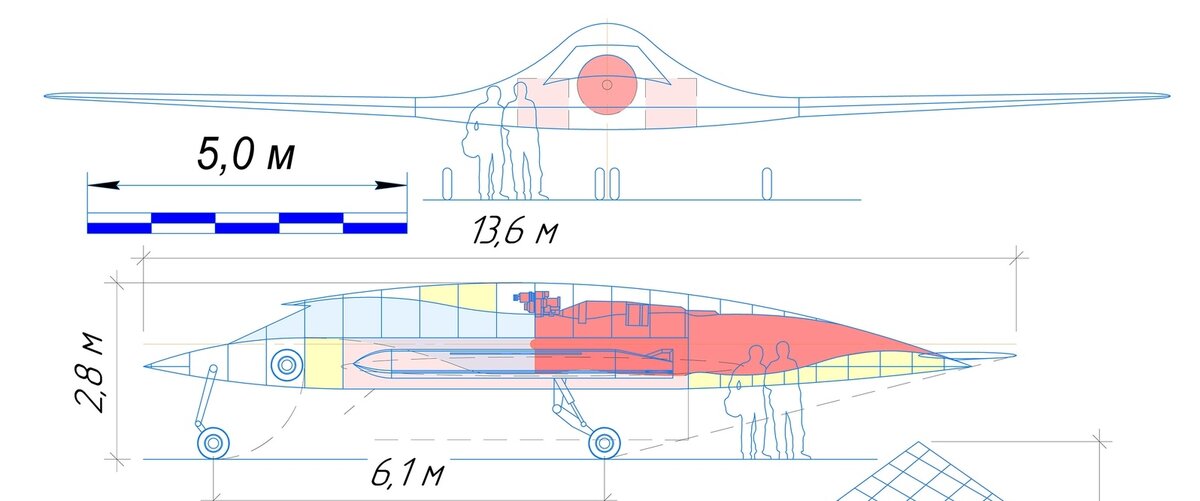
Проект «Скат» предлагал строительство аппарата схемы «летающее крыло» с максимальной взлетной массой 10 т. Длина изделия превышала 10 м, размах крыла – 11,5 м. Аппарат должен был развивать скорость до 850 км/ч и лететь на дальность до 4 тыс. км. С помощью беспилотника планировалось решать задачи разведки и нанесения ударов по наземным объектам. В связи с этим он должен был нести оптико-электронное оборудование, средства навигации и т.д., а также разнообразное вооружение. Прежде всего, «Скат» предполагалось оснащать управляемыми ракетами и бомбами.
Согласно планам разработчиков, новый «Скат» должен был отличаться малой заметностью для средств обнаружения противника, что позволило бы эффективнее решать поставленные задачи, в том числе над районами с развитой противовоздушной обороной. В связи с этим аппарат получил характерный внешний вид с плавными обводами и без крупных выступающих деталей. Все вооружение предлагалось перевозить во внутреннем грузоотсеке.
Согласно проекту, беспилотник должен был иметь один турбореактивный двигатель. Вскоре стало известно, что в этой роли будет использоваться изделие РД-5000Б. В апреле 2008 года , привлеченная к проекту «Скат», огласила некоторые подробности своей работы. Утверждалось, что двигатель для БПЛА создается на основе существующего РД-33. Для решения поставленных задач последний должен был лишиться форсажной камеры и получить некоторые обновленные устройства. За счет этого можно было обеспечить требуемые летно-технические характеристики. Снижение заметности в инфракрасном диапазоне должно было достигаться за счет специального плоского сопла.
Новые доработки
Редактор газеты «Независимое военное обозрение» Дмитрий Литовкин в разговоре с RT обратил внимание, что в Новосибирске состоялась выкатка доработанной версии беспилотника, оснащённого новым, плоским соплом, существенно снижающим его заметность. Современные условия ведения боя постоянно эволюционируют, и применение ударных беспилотников в различных военных операциях приобретает всё большую актуальность, пояснил Литовкин
Современные условия ведения боя постоянно эволюционируют, и применение ударных беспилотников в различных военных операциях приобретает всё большую актуальность, пояснил Литовкин.
Также по теме

Ударный «Орион»: как новые беспилотники усилят Вооружённые силы России
Министерство обороны России впервые опубликовало фото ударного беспилотника «Орион». На нём БПЛА демонстрируется в пустынном камуфляже…





«Мы видели результаты конфликта в Нагорном Карабахе, где турецкие БПЛА Bayraktar сыграли, наверное, решающую роль в обеспечении победы Азербайджана над Арменией. Понятно, что такая техника нужна и российским военным, потому что в некоторых ситуациях гонять самолёт с пилотом, рискуя жизнью человека, нецелесообразно. Беспилотник — вещь дорогая, но это робот, потеря которого бьёт только по кошельку», — рассказал эксперт.
В свою очередь, военный эксперт Алексей Леонков отметил, что выкатка нового лётного образца «Охотника» говорит об уверенном и плановом развитии этого проекта.
«Выкатка состоялась в новом корпусе и в новом фюзеляже, которые созданы по технологии пониженной радиоавиационной заметности. Это говорит о том, что работа выходит на финишную прямую. И скоро беспилотники поступят на вооружение нашей армии и флота», — пояснил собеседник RT.
Использование таких БПЛА позволит Вооружённым силам РФ с ещё большей эффективностью реализовывать концепцию создания так называемой зоны воспрещения доступа и манёвра, добавил Леонков.
Эта концепция, в западной военной теории называемая A2/AD, представляет собой построение различных средств ПВО, противокорабельной ракетной обороны и оперативно-тактических ракетных комплексов, которые позволяют преградить противнику доступ в критически важные районы.
«Остаётся ещё несколько испытаний, в том числе с применением оружия: БПЛА должен уметь пользоваться авиационными средствами поражения, которыми его оснастят, и поражать цели с высокой точностью. После этого будет принято решение о его приёме в ряды вооружённых сил», — заключил эксперт.
1.5 Разработка беспилотных летательных аппаратов в РФ и за рубежом
Рынок беспилотных летательных аппаратов — один из наиболее быстрорастущих сегментов авиационного рынка во всем мире. По прогнозам мировой печати инвестиции в эту область в ближайшее десятилетие будут исчисляться многими миллионами долларов.
На сегодняшний день разработкой БЛА для военных и гражданских целей в РФ занимается ряд фирм оборонного комплекса (ОКБ «Сокол» (Казань), НИИ «Кулон», КБ «Луч») и коммерческих организаций (ООО «ТеКнол»).
Сложно однозначно определить наиболее эффективный подход. С одной стороны, только налаженная кооперация оборонного комплекса способна создать сложный и многофункциональный БЛА, но с другой стороны, с учетом современных тенденций миниатюризации таких аппаратов, подключения частного капитала, а также простотой покупки электроники за рубежом (при условии не использования в изделиях военного назначения) задача по созданию БЛА вполне выполнима и небольшой коммерческой организацией.
1.5.1 Микро БЛА. Военное применение
В настоящее время без БЛА не обходится ни один вооруженный конфликт с участием армий развитых стран. Широкое внедрение подобных ЛА отвечает концепциям повышения автоматизации управления подразделениями и частями и сокращения потерь личного состава. Разведывательный комплекс, основанный на БЛА, служит для обеспечения командира на поле боя воздушной разведывательной информацией о текущей обстановке в его зоне ответственности. Использование такого комплекса позволяет обходиться без заявок на разведку в вышестоящий штаб (связанный с “большой” авиацией) и избавляет от ожидания результатов разведки. БЛА способны и уже активно выполняют задачи, решаемые разведгруппами.
Однако существующие БЛА и ДПЛА (дистанционно пилотируемые летательные аппараты) – это сложная, объемная техника, требующая подготовленных специалистов. Такую технику сложно разместить на переднем крае, не говоря о том, чтобы взять её с собой в разведку. Таким образом, перед разработчиками новых перспективных БЛА встала задача создания мобильных, простых в эксплуатации и дешевых средств ведения воздушной разведки.
Ряд научно – исследовательских учреждений и конструкторских бюро в США и во всем мире подошли к решению этой задачи через уменьшение размеров БЛА и упрощение управления ими, наделяя их большой автономностью – мини- и микро-БЛА. Повышенный интерес в этому классу аппаратов в последнее время, согласно данным Управления перспективных исследований и разработок МО США (DAPRA), является результатом одновременного появления новых достижений в области миниатюризации компонент ЛА и новых военно-технических концепций применения таких аппаратов, лежащих в русле перспективных концепций информатизации вооруженной борьбы. Идея серии БЛА размером с ладонь (MAV – micro air vehicle), была предложена DARPA. Для оценки технической реализуемости аппаратов DARPA проводит работы по основным компонентам таких аппаратов (планеру, энергосиловой установке, двигателю, полезной нагрузке – информационным датчикам, системе управления и навигации). DARPA финансирует работы по ряду таких устройств, в том числе по лёгким батареям и пьезоэлектрическим моторам для машущих крыльев. Последние могут быть эффективны для микроаппаратов нетрадиционных аэродинамических компоновок, осуществляющих полёт по принципу птиц или насекомых. Целевая потребность в аппаратах этого класса связывается с прогнозируемыми условиями ведения конфликтов в XXI-м веке. При этом особо выделяются боевые действия в нестандартных условиях, например, в городских .
Локально управляемые мини- и микро-БЛА позволят значительно уменьшить время ожидания, свойственное существующим средствам разведки, и, действуя по требованию отдельного солдата, выдавать информацию относительно окружающей обстановки, повышать ситуационную осведомленность и на этой основе повышать эффективность предпринимаемых действий, снижая требования к численности и уменьшая потери среди личного состава подразделений.
1.5.2 БЛА для задач гражданского потребителя
Кроме военных областей применения существует большое количество потенциальных коммерческих приложений БЛА. Они включают оперативный контроль движения, контроль границ, противопожарный дозор и спасательные операции, мониторинг в лесном хозяйстве, наблюдение живой природы, мониторинг и фотосъемку недвижимости и др.
История развития военных дронов
Первый военный беспилотник появился в Америке в 1910 году. Под управлением часового механизма, самолет с боезарядом падал на объект. Но идея не нашла применения.
1933 год считается годом рождения БПЛА, первые образцы которого изготовила Великобритания. Боевые беспилотники были многоразового использования, радиоуправляемыми и служили до 1943 года. Применялись как мишени для зенитчиков и истребителей.
1910 в этом году в Америке появился первый беспилотник
Во 2-й мировой войне Германия успешно применяла управляемые ракеты ФАУ-1 и ФАУ-2.
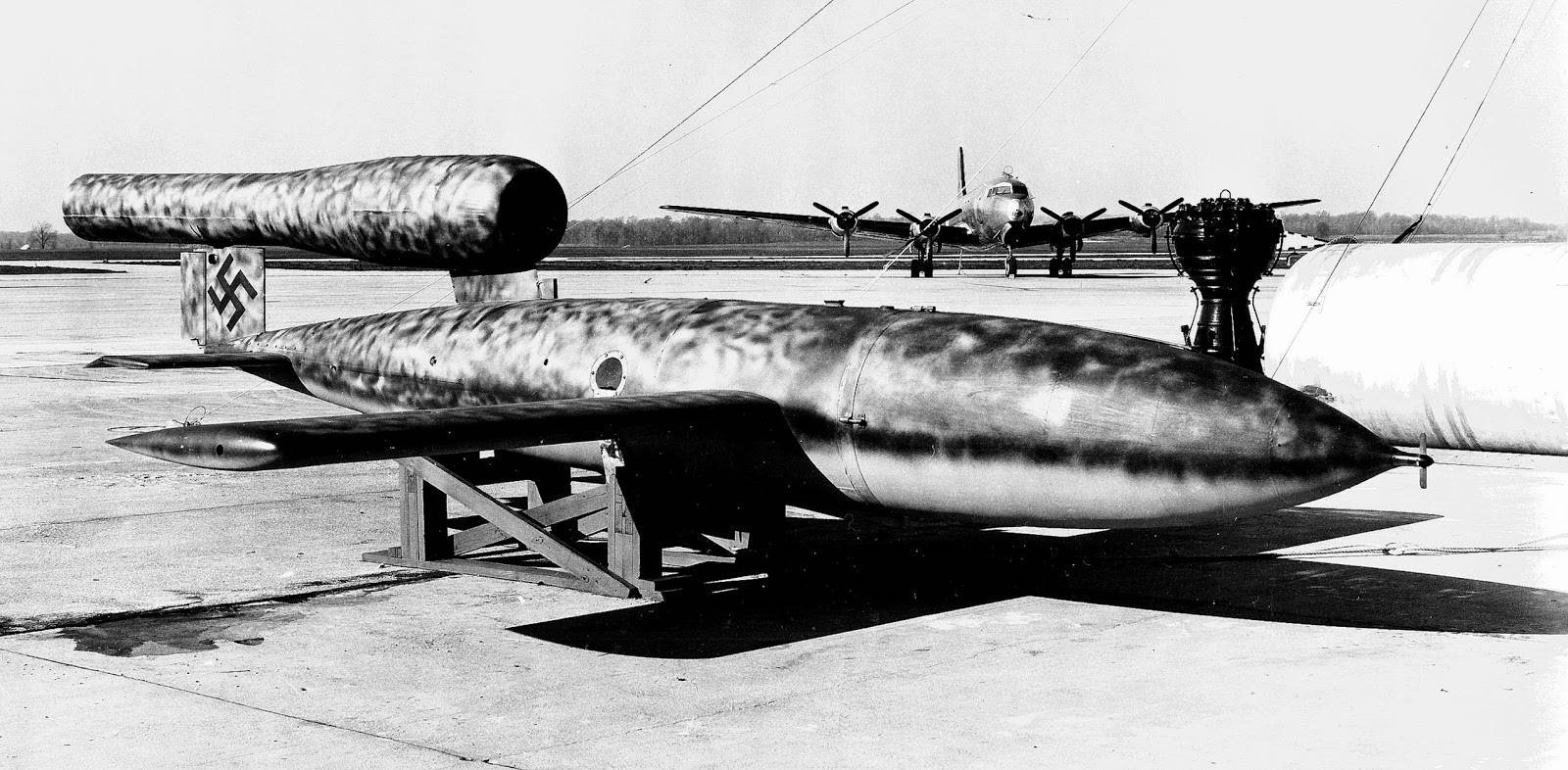 Немецкая Фау-1
Немецкая Фау-1
В США тогда же был разработан свой вариант БПЛА. Это был легкий двухмоторный военный бомбардировщик Interstate TDR-1, изготовленный из фанеры и велосипедных труб. Самолет имел слабые летные характеристики. Управление велось по радио с борта летящего рядом самолета, через телекамеру, расположенную в носовой части фюзеляжа беспилотника. Выпущено было более 180 шт.
 Interstate TDR-1
Interstate TDR-1
В 1960 году, после опыта вьетнамской, и других локальных войн, Пентагон начал интенсивно развивать программу беспилотников. Вначале это были легкие разведчики, а после стали разрабатываться ударные варианты, которые применялись во многих локальных конфликтах.
В Советском Союзе также велись разработки аналогичных средств, однако они остались на бумаге. Возобновились они в 1957 году. Первый советский беспилотный ударный комплекс назывался Изделие-С. Идея принадлежала конструктору А.Н.Туполеву.
Уже через год был создан объект, который мог доставить ядерный заряд на расстояние до 10000 км. Однако интересы руководства страны были направлены на создание ракетной техники. По этой, и еще ряду причин, это перспективное направление было заморожено на несколько лет.
Описание
Принцип действия ИС основан на измерении скорости движения ТС по разности частот между излученным ИС радиолокационным сигналом и сигналом, отраженным от движущихся транспортных средств (эффект Доплера).
Измерение местоположения ТС на контролируемом участке дороги основано на измерении расстояния до ТС по разности фаз между сигналами на различных несущих частотах, измерении угла между нормалью к излучающей поверхности ИС и направлением на ТС (далее -угол на ТС) по разности фаз между сигналами, принятыми пространственно разнесенными антеннами, и измерении дистанции до ТС (расстояния в плоскости дороги от места установки ИС до ТС вдоль направления движения) с учетом высоты установки ИС.
Измерение времени фотографирования ТС основано на значении национальной шкалы координированного времени UTC (SU), полученном от встроенного в ИС приемника глобальной навигационной спутниковой системы ГЛОНАСС/GPS (с разрядностью до секунды) и измерении интервала времени между фронтом секундного импульса PPS и моментом времени фотографирования ТС. Для измерения временных интервалов используется счетчик импульсов внутреннего таймера ИС, запуск счета которого синхронизирован с фронтом секундного импульса PPS.
ИС предназначен для установки:
— сбоку от контролируемого участка дороги на расстоянии от 2 до 5 м от края ближайшей контролируемой полосы движения на высоте от 0,5 до 5 м. Горизонтальный угол к направлению движения транспорта 20 ± 5°, вертикальный угол от 0 до 15°;
— сверху над контролируемым участком дороги над любой из контролируемых полос движения, либо сбоку от них на расстоянии до трех метров от края ближайшей полосы движения на высоте от 6 до 10 метров. Горизонтальный угол к направлению движения транспорта от 0 до 15° и вертикальный угол 20 ± 5°.
Размеры контролируемого участка дороги (далее по тексту — зона контроля) зависит от параметров установки ИС (высота над дорожным полотном, углы к направлению движения ТС, расстояния до полосы движения ТС) и соответствуют следующему диапазону значений:
— длина зоны контроля вдоль направления движения ТС от 6 до 25 м;
— ширина зоны контроля поперек направления движения ТС от 9 до 14 м.
Конструктивно ИС выполнен в едином влагозащищенном и ударопрочном корпусе с
элементами крепления и содержит радиолокационный модуль, видеокамеру, вычислитель с энергонезависимым накопителем данных, инфракрасный прожектор, приемник глобальной спутниковой системы ГЛОНАСС/GPS, плату интерфейсов, плату питания и систему обогрева. На корпусе ИС установлена шильда, содержащая наименование и серийный номер ИС, торговую марку изготовителя и знак утверждения типа средства измерений. ИС защищен от несанкционированного вскрытия специальными пломбами, разрушающимися при попытке удаления.




ИС с комплектом дополнительного оборудования совместно образуют передвижной или стационарный многоцелевой комплекс автоматической фотофиксации нарушений правил дорожного движения (далее по тексту — ПДД).
Лист № 2 Всего листов 6
Общий алгоритм работы ИС заключается в следующем: после въезда ТС в зону контроля ИС непрерывно производит измерение его скорости и местоположения до момента выезда ТС из зоны контроля. Синхронно с измерениями производится фотографирование зоны контроля. Вычислитель ИС по результатам измерений определяет положение ТС на фотографиях, автоматически формирует общую фотографию зоны контроля и кадр с изображением ТС крупным планом (кадр фотофиксации), и далее сохраняет в энергонезависимом накопителе данных фотографии и результаты измерений в виде цифровых файлов, защищенных от модификации цифровой подписью. Результат работы ИС представляет собой кадр фотофиксации с графической подписью. В графической подписи вносятся обязательные данные о результатах измерений, заводском номере ИС, месте установки ИС, а также может вноситься дополнительная информация.
Внешний вид и места установки шильды и пломб ИС показаны на рисунках 1 и 2
Различия между акулами и скатами
| Сравнение акул, рохлевых скатов и скатов | |||
| Характеристика | Акулы | Рохлевые скаты | Скаты |
| Форма | Веретенообразная, сжатая латерально | Диск, сжатый дорсовентрально (уплощённый) | Диск, сжатый дорсовентрально (уплощённый) |
| Брызгальца | Имеются не у всех видов | Имеются у всех видов. Развиты лучше, чем у акул. | |
| Среда обитания | как правило, кормятся в пелагиали у поверхности воды, хотя есть донные виды | существуют как пелагические, так и донные виды | обычно кормятся у дна |
| Глаза | Обычно расположены на голове латерально. Глазное яблоко не прирощено к орбите. Мигательная перепонка имеется не у всех видов. | Обычно расположены на голове дорсально | Обычно расположены на голове дорсально. Глазное яблоко прирощено к орбите. Мигательная перепонка отсутствует |
| Жаберные щели | Расположены латерально | Расположены вентрально | |
| Зубы | Как правило, острые и лезвиевидные, однако у некоторых видов имеют вид тёрки | Шипообразной формы, сильно уплощены и закруглены | |
| Грудные плавники | Заметно выражены | Не выражены | Не выражены |
| Хвост | Крупный хвостовой плавник, который служит для продвижения вперёд | хвостовой плавник может использоваться для продвижения вперёд | форма варьируется от толстого хвоста, являющегося продолжением тела, до тонкого «хлыста» сходящего на нет |
| Анальный плавник | Как правило имеется, но у некоторых видов отсутствует | Отсутствует. | |
| Характер движения | плавают, двигая хвостовым плавником из стороны в сторону | у рохлевых и пилорылых скатов хвостовой плавник подобен акульему | плавают, взмахивая грудными плавниками как крыльями |
СКАТ в Северной столице
Внедрение СКАТ было начато в Санкт-Петербурге в 2008 г. и стало крупнейшим в России проектом по автоматизации общественного транспорта на уровне государственного заказчика. Система зарегистрирована в Едином реестре информационных ресурсов и информационных систем Санкт-Петербурга и имеет РНИС № 1555/13/06 от 22.07.2013.
Предпосылки и старт проекта
К 2008 г. стало ясно, что городу необходимо радикально изменить систему управления транспортом. До этого времени в Санкт-Петербурге была выстроена двухуровневая административная структура управления, где исполнительный уровень был представлен перевозчиками, а стратегический — городским Комитетом по транспорту. С каждым годом объемы субсидирования перевозчиков за перевозку льготников все увеличивались, а качество обслуживания пассажиров вызывало многочисленные нарекания. Стало понятно, что такая система является малоэффективной. Требовалось введение среднего уровня, который аккумулировал бы организационные и управленческие задачи по пассажирским перевозкам. В итоге был дан старт проекта по созданию новой системы управления городским транспортом.
Проект начался с того, что были приняты нормативно-правовые акты, преобразующие систему управления транспортом из двухуровневой в трехуровневую. Звеном между Комитетом по транспорту и перевозчиками стало Санкт-Петербургское государственное казенное учреждение (СПб ГКУ) «Организатор перевозок», на которое были возложены все организационные функции и большинство управленческих задач. В итоге весь транспортный комплекс мегаполиса оказался в одних руках, в то время как в других городах России это далеко не всегда так, что приводит к большому количеству всевозможных издержек.
Интеграция всех приложений в единое информационное пространство
Одной из первостепенных задач СПб ГКУ «Организатор перевозок» поставило создание единой системы мониторинга и управления городским транспортом. С внедрением новой модели управления перевозками с включением среднего, организационного уровня стало понятно, что получившаяся структура нуждается в совершенно иных программных и аппаратных комплексах, нежели предлагал рынок телематики на 2008 г. А именно: все поставщики предлагали решения уровня компаний-перевозчиков или автопарковых предприятий, но никак не решение уровня мегаполиса, решающего комплексные задачи по всей наземной сети общественного пассажирского транспорта. На предварительной стадии были рассмотрены решения, предлагаемые более чем 30 российскими и зарубежными компаниями. В конкурсе принимали участие разработки, представленные как лидерами рынка, так и нишевыми компаниями. Группа компаний CSBI выиграла этот конкурс, представив систему комплексной автоматизации транспорта, отвечающую ключевым требованиям СПб ГКУ. В отличие от альтернативных решений, была предложена вертикально интегрированная система, то есть изначально разрабатываемая для решения задач тактического и стратегического уровней управления.
Начало работы
В I квартале 2010 г. в Центре автоматизированной системы управления городским и пригородным пассажирским транспортом (Центр АСУ ГППТ) Санкт-Петербурга СКАТ приступила к «боевому дежурству». Также система полностью автоматизирует управление наземными пассажирскими перевозками в Санкт-Петербурге, включая водный пассажирский транспорт (аквабусы).
Итоги
Такой проект, как создание и внедрение интеллектуальной информационной транспортной системы СКАТ, подводит технологический и инновационный фундамент для реализации социальной политики города, развития социальных сервисов для жителей и гостей Санкт-Петербурга.
Результаты внедрения:
- централизация всех процессов управления пассажирским транспортом в единой системе;
- единые административные регламенты взаимодействия внутри системы;
- реализация сквозного процесса управления «Мониторинг–Планирование–Финансовый анализ»;
- переход от изолированного решения отдельных задач к комплексному управлению транспортным процессом в городе (все виды наземного транспорта);
- единый диспетчерский центр;
- единый стандарт интеграции;
- создание единого информационного пространства;
- объединение данных всех ведомств, участвующих в процессе;
- сокращение затрат на инфраструктуру;
- оптимизация межведомственного взаимодействия;
- экономия бюджетных средств за счет:
- автоматического расчета субсидий для компаний-перевозчиков и контроля исполнения условий государственного контракта
- перераспределения и сокращения штата диспетчеров.