Сплошное радиолокационное поле
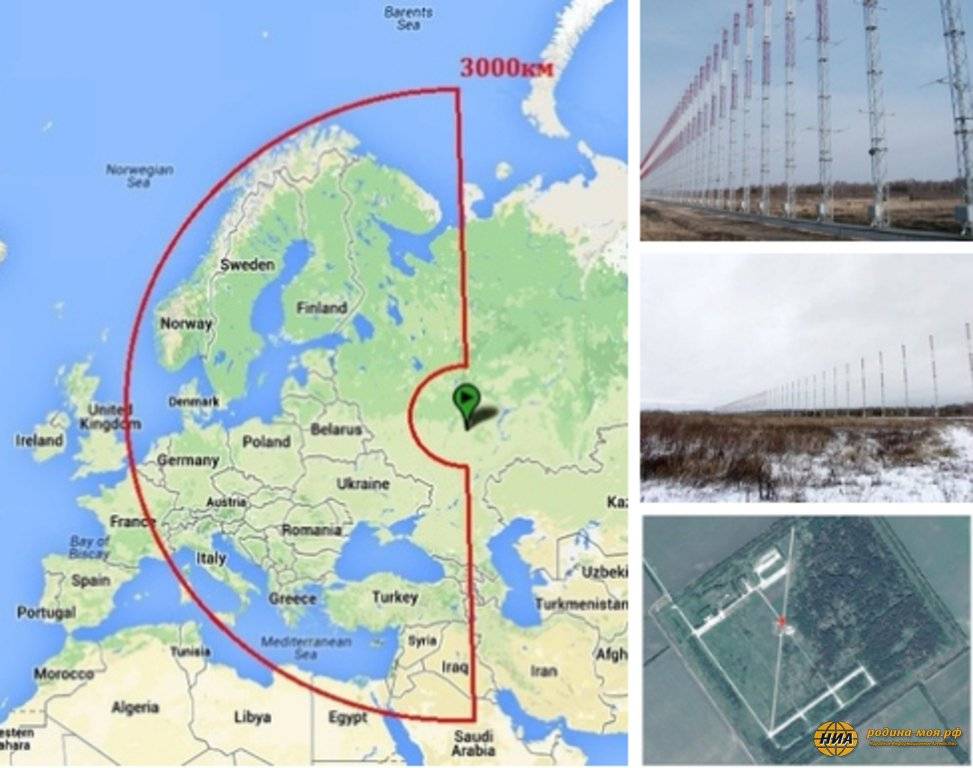
Строительство и постановка на боевое дежурство головной РЛС 29Б6 «Контейнер» является первым шагом в деле очередного совершенствования отечественной системы ПВО и ПРО. К настоящему времени вдоль границ России создано сплошное радиолокационное поле, обеспечивающее слежение за обстановкой и выявление опасных объектов. В будущем «Контейнеры» обеспечат расширение возможностей такой системы.
Согласно текущим планам, в обозримом будущем в разных районах России построят и поставят на дежурство еще три загоризонтные РЛС 29Б6 «Контейнер». Нижегородско-мордовский комплекс следит за западным направлением, а три других станции будут отвечать за Арктику, Восток и Юг.
Еще несколько лет назад стало известно о строительстве второго «Контейнера» на Дальнем Востоке. Очевидно, это изделие будет следить за полетами над Тихим океаном и странами Азиатско-Тихоокеанского региона. В ближайшее время должно завершиться строительство, после чего РЛС поставят на опытно-боевое дежурство.
Следующей может появиться РЛС на Арктическом направлении. Сейчас НИИДАР занимается соответствующими вопросами. Строительство арктической станции может начаться в ближайшие годы. Вероятно, для эксплуатации в суровых северных условиях исходный проект нуждается в какой-либо доработке.
Описание
НРЛС «Репейник» предназначена для обнаружения и сопровождение сверхмалых объектов на расстоянии до 10 км, высоте до 5 км и скорости до 200 км/ч. Носимое исполнение обеспечивает тактическое автономное применение между населенными пунктами в условиях боевых действий, а также охранных мероприятий.
Узкий луч сканирования обеспечивает скрытность работы станции и снижает риски поражения противорадиолокационными ракетами, что в совокупности с компактными размерами и пятиминутным развертыванием обеспечивает повышение эффективности работы штурмовых/разведывательных групп на территории противника или групп охранения на линиях соприкосновения. Применение не доплеровского эффекта позволяет обнаруживать неподвижные цели (зависшие БпЛА).
Автономность работы станции обеспечивается компактным источником питания в течении 8 часов интенсивной работы. Дополнительно предусмотрено питание от сетей 220В и автомобильных систем 12В.
Конструкция разработана с учетом применения в различных широтах и погодных условиях, в том числе морских прибрежных районах, а элементы станции могут быть окрашены различными видами камуфляжа, включая применение покрытий с ИК-ремиссией.
Особенности:
- сектор сканирования 360 градусов
- компактные размеры и пятиминутное развертывание
- мобильность и автономность от носимого источника питания
- всепогодное и круглогодичное применение
- отсутствие «мертвой зоны» РЛС
- упрощенная интеграция с существующими системами оповещения и комплексами подавления БпЛА (РЭБ)
- возможность хранение траекторий движения объектов для последующего анализа
- современный графический интерфейс с топографическими картами местности
- разрешенный частотный диапазон 9,2 – 9,5 ГГц
- обнаружение целей на скоростях до 200 км/ч
- возможность регулировки угла места для эффективности применения в складках местности
- обнаружение неподвижных целей (зависшие БпЛА)
Для гражданского охранного сектора применяемый частотный диапазон не требует специальных разрешений надзорных ведомств, т.к. уровень ЭМИ соответствует СанПиН.
Данные траекторной обработки радиолокационного сигнала (целеуказания) могут применяться в ситуационных центрах обработки оперативной информации, комплексах технических систем охраны и противодействия несанкционированному проникновению в охраняемые зоны, а также автоматизированных и ручных средствах радиоэлектронной борьбы (РЭБ).
Сопровождение и анализ целей осуществляется в современном графическом интерфейсе, созданном по UI/UX-методологии, с возможностью подключения топографических карт местности для интуитивного ориентирования. Программное обеспечение поддерживает различные операционные системы и платформы, а также позволяет одновременно получать и обрабатывать информацию от нескольких станций, объединенных в единую сеть.
Типы обнаруживаемых целей:
- беспилотные летательные аппараты (БпЛА), включая неподвижные
- любые заданные цели, включая людей и транспортные средства
Перспективные схемотехнические решения с использованием современной элементной базы и программная реализация алгоритмов цифровой обработки сигналов существенно снизили энергопотребление и габариты НРЛС «Репейник», одновременно увеличив ее эффективность.
Новейшие системы РЛС «Небо-М» заступили на дежурство в Крыму
- cdn.iz.ru
Размещенные в Крыму российские радиолокационные станции (РЛС) позволяют контролировать обстановку в воздушном пространстве над всем Черным морем. Высокоточные системы 55Ж6М «Небо-М» способны обнаруживать широкую номенклатуру сложных целей — от самолетов и вертолетов до крылатых ракет и гиперзвуковых аппаратов. Такие комплексы монтируются на машинах и могут быть оперативно развернуты в любой части полуострова. В Сирии 55Ж6М доказали свою высокую эффективность на авиабазе Хмеймим. Как рассказали «Известиям» в главном командовании Воздушно-космических войск, системы «Небо-М» переброшены в Крым в начале нынешнего года. Эти РЛС вошли в состав 31-й дивизии ПВО. Расчеты станций уже заступили на дежурство.
«Небо-М» относится к межвидовым РЛС больших и средних высот и является самой совершенной в своем классе. Система отличается помехоустойчивостью и максимальной автоматизацией всех процессов. Комплекс способен увидеть до 200 целей, летящих со скоростями до 18 тыс. км/ч, в радиусе до 1800 км и на высотах до 600 км. Радар может обнаруживать, сопровождать и захватывать цели за пределами а одновременно работает в метровом, дециметровом и сантиметровом диапазонах. Это позволяет системе вычислять координаты целей с точностью до сантиметра. РЛС определяет не только координаты воздушного объекта, но и его государственную принадлежность. Компьютеры системы способны выявлять стелс-цели. Для этого разработан специальный алгоритм. Он в автоматическом режиме анализирует слабые отраженные сигналы в трех диапазонах и идентифицирует «невидимок».
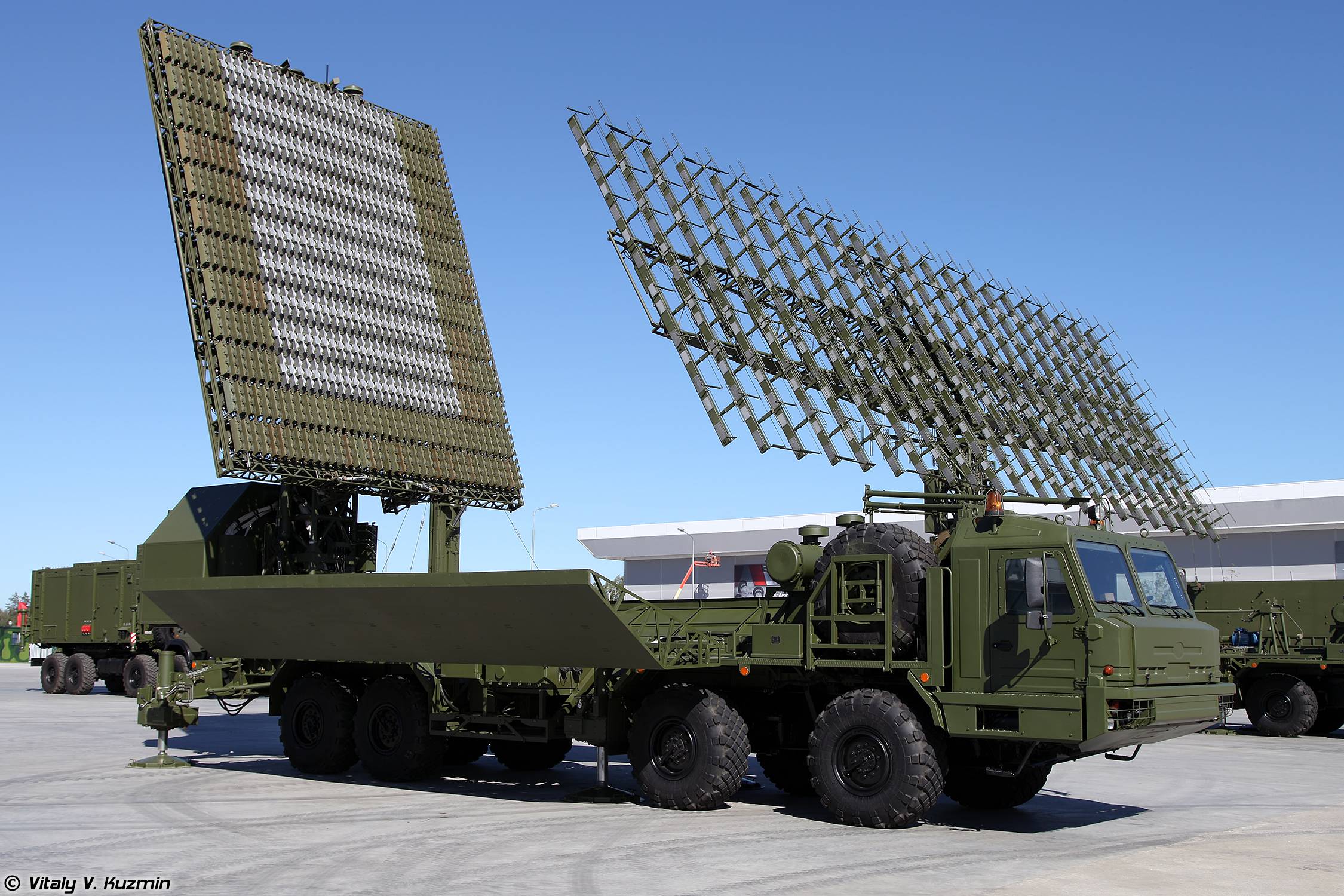
Радиолокационный комплекс 55Ж6М создан на базе четырех автомобилей БАЗ 6909-015 высокой проходимости. Три из них — радиолокационные станции — метрового, дециметрового и сантиметрового диапазона соответственно. Их легко отличить по многометровым ажурным антеннам сложной конфигурации. Каждый из этих модулей обеспечен встроенным источником энергоснабжения и гидравлическими системами свертывания-развертывания антенн. Это позволяет подготовить РЛС к работе за 15 минут. Благодаря высокой мобильности станции «Небо-М» могут быстро менять позиции и уходить из-под удара противорадиолокационных ракет.
В четвертой машине находится пункт управления и обработки информации. Фактически это миниатюрный вычислительный центр.
Благодаря развертыванию в Крыму станций семейства «Небо» над всей акваторией Черного моря будет создано сплошное радарное поле, рассказал «Известиям» бывший начальник зенитных ракетных войск генерал-лейтенант Александр Горьков. По его словам, с помощью 55Ж6М можно контролировать воздушное пространство до проливов Босфор и Дарданеллы.
— Это станции дальнего обнаружения, которые позволяют контролировать воздушную обстановку, отслеживать активность авиации и выявлять потенциальные угрозы на дальних подступах, — отметил эксперт.
Основа системы противовоздушной обороны Крыма — 31-я дивизия ПВО. Входящие в ее состав полки — 12-й в Севастополе и 18-й в Феодосии — получили системы С-300 и С-400. В Крыму стоят на боевом дежурстве зенитные ракетно-пушечные комплексы «Панцирь-С». В ближайшее время 1096-й зенитно-ракетный полк Черноморского флота будет перевооружен на комплекс «Бук».
Типовые сценарии применения НРЛС «Репейник»
Разведывательная группа, убедившись стационарными средствами обнаружения в отсутствии БпЛА противника в секторе прохода ЛБС, пересекает ЛБС и на расстоянии середины дистанции маршрута разворачивает НРЛС Репейник, продолжая дальнейший маршрут и выполнение задания. Станция закрывает небо в диаметре 20 км или на расстоянии 10 км в каждую сторону маршрута следования от места установки. Вся информация о воздушной обстановке транслируется на планшеты бойцов группы. При обнаружении на маршруте следования БпЛА противника, разведывательная группа принимает решение о принятии мер дополнительной маскировки для не привлечения внимания БпЛА или подавлении обнаруженного БпЛА переносными модулями РЭБ.
-
Штурмовая группа, развернув на ЛБС станцию и убедившись в отсутствии БпЛА противника в секторе, пересекает ЛБС и продолжает дальнейший маршрут, выполняя боевой выход. Станция закрывает небо в диаметре 20 км или радиусом сектора 10 км от места установки. Вся информация о воздушной обстановке транслируется на планшеты бойцов группы с переносными комплексами РЭБ. При обнаружении БпЛА противника, бойцы группы подавляют обнаруженные БпЛА переносными модулями РЭБ или активирует быстро разворачиваемые автоматические турели РЭБ.
На ЛБС разворачивается одна или несколько станций с включенным режимом скрытия тыловой обстановки для исключения сопровождения взлетающих в тылу дружественных БпЛА. При необходимости, станции периодически перемещаются вдоль ЛБС для обеспечения живучести. Силами разведывательных групп за ЛБС на нейтральной территории скрытно устанавливаются замаскированные автоматические турели РЭБ, соединенные беспроводным методом в единую интрасеть со станциями. Вся информация о воздушной обстановке, установленных автоматических турелях РЭБ и местонахождении бойцов охранения с переносными комплексами РЭБ транслируется в ситуационный центр. При обнаружении БпЛА противника, оператор ситуационного центра подавляет обнаруженные БпЛА с помощью автоматических турелей РЭБ или выдавая данные азимута и высоты в ближайшие к цели переносные средства РЭБ у бойцов.
В противоположных частях объекта (не более 10 км) разворачивается одна или две станции, а также автоматические турели РЭБ, соединенные в единую интрасеть со станциями. Вся информация о воздушной обстановке, установленных автоматических турелях РЭБ и местонахождении охраны с переносными комплексами РЭБ транслируется в ситуационный центр объекта. При обнаружении нарушающего режимность объекта БпЛА, оператор ситуационного центра подавляет обнаруженные БпЛА с помощью автоматических турелей РЭБ или выдавая данные азимута и высоты в ближайшие к цели переносные средства РЭБ у бойцов.






Общие рекомендации более эффективного применения:
- автоматизированные турели РЭБ рекомендуется устанавливать между местом разворачивания станции и точкой выполнения задания
- выставлять угол места станции в соответствии со складками местности
- НРЛС Репейник и автоматические турели РЭБ возможно объединять многофункциональным интерфейсом в единую систему
- планшет отображения воздушной обстановки возможно применять для ориентирования на местности
| Тип цели | ЭПР, кв.м | Обнаружение, м | Подавление, м |
|---|---|---|---|
| БпЛА типа DJI Phantom, DJI Mavic | 0,01 | 2 000 | 1 200 |
| БпЛА типа DJI Matrice 300 RTK | 0,1 | 2 700 | 1 400 |
| БпЛА типа Байрактар ТБ2 | 1 | 4 500 | 1 500 |
| Объекты с ЭПР 10 кв.м | 10 | 10 600 | 1 500 |
| Наименование параметра | Величина |
|---|---|
| Инструментальная дальность, км | 15 |
| Время развертывания, минут | 5 |
| Количество одновременно сопровождаемых целей | 256 |
| Тип антенной решетки | ФАР |
| Частотный диапазон, ГГц | X (9,2 – 9,5) |
| Сектор сканирования, град | 360 |
| Угол места, град | 20 |
| Темп выдачи информации, с | 2,5 |
| Излучаемая мощность, Вт | 2 |
| Потребляемая мощность, Вт | 65 |
| Питание, В | ~220/12 |
| Возможность объединения в единую сеть нескольких станций | Да |
| Интеграция с системами подавления (РЭБ) | Да |
| Габаритные размеры (Д×Ш×В), м | 0,3×0,46×0,65 |
| Диапазон рабочих температур, град | от -20 до +50 |
| Масса (нетто) радиолокационной станции, кг | 25,5 |
Всевысотный обнаружитель собирается диктовать новые правила локации
Сокращение частей и подразделений зенитных ракетных войск, прошедшее в последнее время, привело к необходимости пересмотра концепции их информационного обеспечения в сторону самодостаточности. В настоящее время информационное обеспечение группировок ЗРВ со стороны внешнего информационного поля радиотехнических войск (РТВ), в условиях применения современных средств воздушного нападения, является явно недостаточным, а в некоторых местах дислокации средств отсутствует вообще. Возникшие проблемы надо было каким—то образом решать.С—3005Н66МПроблемы целеуказания и поиски выходаС—300СТ—68СТ—6896Л696Л6С—300Приемная система РЛС представляет собой 6—канальный приемник для приема эхо—сигналов от 3—х основных каналов и 3—х каналов приема сигналов от антенны подавления боковых лепестков (ПБЛ) и обеспечивает полностью цифровую обработку сигналов на промежуточной частоте.Взгляд в будущее■ Вероятность захватаВозможность межвидового применения96Л6Виктор Кореньков, начальник управления Государственного оборонного заказа ОАО «ЛЭМЗ» Александр Колик, главный конструктор ВВО ОАО КБ «Лира»Использованы материалы с сайта site3f.ru
Помехи не преграда
В 1995 году в Вооруженные силы России начались поставки модернизированной РЛС 55Ж6У «Небо-У». Увы, экономические проблемы страны затронули и эту сферу производства. После улучшения ситуации компания «Нител» в 2009 году поставила в войска четыре РЛС «Небо-У».
АО НИТЕЛ
Сейчас в эксплуатации находится более 70 таких радиолокационных станций, которые несут круглосуточное боевое дежурство и способны обнаруживать цели на дальности до 460 км.
Наконец, в результате дальнейшей модернизации появилась РЛС «Небо-УМ» — подвижная трехкоординатная радиолокационная станция средних и больших высот дежурного режима. От предшественника ее отличает более совершенное оборудование, выполненное на новейшей элементной базе отечественного производства. «Небо-УМ» состоит из нескольких модулей: антенно-аппаратного комплекса, кабины управления с рабочими местами расчета и системы автономного электроснабжения.
Станция позволяет обнаруживать, опознавать и сопровождать воздушные цели — как динамические (летательные аппараты и крылатые ракеты), так и баллистические (боевые блоки межконтинентальных баллистических ракет). «Чувствительность» позволяет засекать даже самолеты, изготовленные по технологии «стелс». РЛС может применяться в войсках ПВО в составе АСУ или автономно.
В рабочем метровом диапазоне волн «Небо-УМ» малоуязвима от самонаводящихся снарядов и противорадиолокационных ракет. В условиях воздействия активных помех защита от них обеспечивается адаптивной перестройкой рабочей частоты и многоканальной системой автокомпенсации.
Несколько основных характеристик РЛС «Небо-УМ». Зона обзора в круговом режиме по дальности 10–600 км и на высоте до 80 км, по азимуту — 360 град, по радиальной скорости — 50–18 000 км/ч.
Плюс высокий темп обновления информации, в том числе по скоростным и маневрирующим воздушным объектам (1–3 сек).
Цифровая обработка сигнала дает возможность использовать алгоритмы, позволяющие за счет пространственного подавления земного луча ослабить влияние подстилающей поверхности на точность измерения высоты и сократить зону нечувствительности по углу места до минимума.
nniirt.ru
Аппаратура станции позволяет не только обнаруживать и сопровождать цели, но и определять их государственную принадлежность. После этого информация передается на командный пункт или операторам зенитных комплексов. Кроме того, при сопряжении со вторичным радиолокатором РЛС может использоваться в качестве трассового локатора для управления воздушным движением.
Япония[править]
Радиолокационные станции Второй мировой войныправить
Наземныеправить
- Та-Чи 1 — РЛС обнаружения воздушных целей, копия радара CR-268
- Та-Чи 2 — упрощенная версия Та-чи 1
- Та-Чи 3 — копия британской РЛС GL Мк 2
- Та-Чи 4 — РЛС обнаружения воздушных целей с мощность до 2 КВт
- Та-Чи 6 — станция раннего предупреждения
Корабельныеправить
- «Та-Се 1» — РЛС раннего предупреждения для транспортных кораблей и подводных лодок, копия Mk.235
- «Та-Се 2» — РЛС обнаружения подводных лодок, использовался для оснащения транспортных судов японской армии
- Type 12 — РЛС обнаружения воздушных целей
- Type 13 — наиболее массовая РЛС императорского флота Японии
- Type 14 — РЛС дальнего обнаружения
- Type 21 — модификация с единственной рабочей частотой (200 МГц)
- Type 22 — РЛС обнаружения воздушных целей. Имел максимальну мощность
- Type 23 — копия немецкого радара Würzburg
- Type 32 — дециметровая РЛС обнаружения надводных целей
- Type 33 — модификация Type 32 с антеннами круглого сечения
- Type 41 — РЛС зенитной артиллерии
- Type 42 — РЛС зенитной артиллерии
- Type 43— РЛС зенитной артиллерии
- J/FPS-1
- J/FPS-2
- J/FPS-3
- J/FPS-4
- J/FPS-5
- J/FPS-7
- J/TPS-100
- J/TPS-101
- J/TPS-102
Корабельные РЛСправить
- FCS-1 — РЛС управления огнем
- FCS-2 — РЛС управления огнем
- FCS-3 — РЛС управления огнем
- OPS-1
- OPS-2
- OPS-3
- OPS-4
- OPS-5
- OPS-10
- OPS-11
- OPS-12
- OPS-13
- OPS-14
- OPS-16
- OPS-17
- OPS-18
- OPS-19
- OPS-20
- OPS-22
- OPS-24
- OPS-28
- OPS-29
- OPS-39
- OPS-50
- ZPS-1 — РЛС для подводных лодок
- ZPS-2 — РЛС для подводных лодок
- ZPS-3 — РЛС для подводных лодок
- ZPS-4 — РЛС для подводных лодок
- ZPS-5 — РЛС для подводных лодок
- ZPS-6 — РЛС для подводных лодок
55Ж6 Небо – Новый оборонный заказ. Стратегии
55Ж6 «Небо» — трехкоординатная РЛС метрового диапазона. Постановлением Совета министров СССР в начале 1975 г. было задано проведение ОКР «Небо» по разработке двух унифицированных трехкоординатных РЛС метрового диапазона волн для войск ПВО страны в транспортабельном исполнении (РЛС 55Ж6 «Небо») и для ПВО сухопутных войск в мобильном исполнении (1Л13 «Небо-СВ»). В том же 1975 г. вышло еще одно Постановление Совмина СССР, в котором ОКР «Небо» была включена в перечень важнейших работ пятилетки. Наряду с ОКР была задана НИР «Угол» по исследованию возможности создания трехкоординатной РЛС в метровом диапазоне.
Разработка РЛС 55Ж6 в рамках ОКР «Небо» велась горьковским НИИРТ (г.Горький, ныне — Нижний Новгород, с 1991 г. — ННИИРТ), главный конструктор — Александр Зачепицкий. Государственные испытания РЛС 55Ж6 были начаты на полигоне Капустин Яр в 1982 г.
Комплекс РЛС 55Ж6 принят на вооружение в 1982 г. За разработку РЛС в 1987 г. коллектив НИИРТ удостоен Государственной премии СССР.
Производилась РЛС 55Ж6 «Небо» Горьковским телевизионным заводом (АО «Нител», г.Нижний Новгород).
Две развернутые РЛС 55Ж6 «Небо» (http://nitel-oao.ru/)
РЛС предназначена для обнаружения, опознавания, измерения трех координат и сопровождения воздушных целей, включая самолеты, изготовленные по технологии «стелс». Применяется в войсках ПВО в составе АСУ или автономно.








РЛС работает в метровом диапазоне волн и совмещает функции дальномера и высотомера. В этом диапазоне радиоволн РЛС мало уязвима от снарядов самонаведения и противорадиолокационных ракет, действующих в других диапазонах, а в рабочем диапазоне эти средства поражения в настоящее время отсутствуют. В вертикальной плоскости реализовано (без использования фазовращателей) электронное сканирование высотомерным лучом в каждом элементе разрешения по дальности. Помехозащищенность в условиях воздействия активных помех обеспечивается адаптивной перестройкой рабочей частоты и многоканальной системой автокомпенсации. Система защиты от пассивных помех также построена на базе корреляционных автокомпенсаторов. Впервые для обеспечения помехозащищенности в условиях воздействия комбинированных помех реализована пространственно-временная развязка систем защиты от активных и пассивных помех..
По состоянию на 2010-е годы РЛС 55Ж6 «Небо» состоит на вооружении частей и соединений ПВО вооруженных сил России.
В состав комплекта РЛС 55Ж6 «Небо» входят:— количество транспортных единиц — 7-8 фургонов-полуприцепов (на трех полуприцепах — антенно-мачтовое устройство, на двух — аппаратура, на трех прицепах — система автономного энергоснабжения)
Время развертывания РЛС — 22 часаСреднее время наработки на отказ — 150 часовПотребляемая мощность — 100 кВт
Тип антенны - ФАР Габариты антенны - 16 х 3.24 м Диапазон длин волн - метровый Зона обзора: - по дальности - 600 км / 1200 км (предельная) - по азимуту - 360 град - по углу места - 16 град - по высоте - 75 км Зона измерения трех координат цели типа "истребитель": - по дальности (на высоте): - 65 км (300 м) - 300 км (10000 м) - более 400 км (20000 м) - по углу места - 16 град - по высоте - 60 км Точность измерения координат цели: - по дальности - 400 / 500 м (по разным данным) - по азимуту - 24 угл.мин - по высоте - 750 / 850 м (по разным данным) Коэффициент подпомеховой видимости системы СДЦ - 45 дБ Условия работы: - температура окружающего воздуха - от -50 до +50 град С - скорость ветра - до 35 м/с Вид выходной информации - координатные точки Объем информации, выдаваемой на АСУ - не менее 300 координатных точек Период полного оборота на 360 град (темп обновления информации) - 10 с
РЛС 55Ж6 «Небо» (http://nitel-oao.ru/)
Модель комплекса РЛС 55Ж6 «Небо»( Музей ОАО «Нител»)
Физика процесса: эффект Доплера, или «умное эхо»
Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10–8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.
Доплеровский метеорологический радиолокатор
В 1848 году эффект Доплера был уточнен французским физиком Арманом Физо, а в 1900 году – экспериментально проверен русским ученым Аристархом Белопольским на лабораторной установке. В этой связи в научно-технической литературе наименование данного эффекта можно встретить под названием «эффект Доплера – Белопольского».
Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t и момент приема отраженного сигнала от цели t1. В результате разность (t1 – t) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд, из которого следует, что дальность до объекта (цели) равна Д = Сtд/2.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т.д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Комплекс средств автоматизации командного пункта радиотехнической бригады (полка)
46Л6 (шифр «Нива»)
46Л6шифрНиваСостав комплекса46Л6•41Л6•11М6•51Ш6•91Ж6•13Х6А41Л641Л6•••5Э26111М651Ш646Л651Ш6•••91Ж6••13Х6А•5И57А•64Т6•57Х661Э6•12М6•П—257—60К•11Ю6•44Ц6•12М6•••П—257—60К11Ю644Ц611Ю6•••44Ц65Э261Возможности комплекса по сбору, обработке и выдаче информации46Л6•Межа—МОснова—1Фундамент—2•ПолеФундамент—1••УниверсалУниверсал—1Протон—2М1•Фундамент—3НиваОснова•Протон—2М1УниверсалУниверсал—1••••••46Л6Нива46Л646Л6•••Боевые возможности КП ртбр (ртп), оснащенного КСА 46Л6••••••••••••••Вторая публикация — исправленная и дополненная. Первая публикация — 15.01.2013 на pvo.forum24.ru








Как «искусственный интеллект» ищет цель
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора.
Представим структурную схему гипотетической РЛС, в основу работы которой положен активный метод радиолокации при импульсном режиме излучения, то есть с использованием импульсных зондирующих сигналов в виде чередующихся во времени отрезков колебаний.
На данной структурной схеме можно представить шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, – передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Передатчик, или передающий тракт РЛС, обеспечивает формирование зондирующего радиосигнала, усиление его до требуемого уровня мощности и передачу в антенную систему. Антенна в импульсном радиолокаторе работает как на передачу, так и на прием. Переключение антенны из режима излучения в режим приема обеспечивается с помощью антенного переключателя, который управляется сигналами системы управления и синхронизации.
Приемник РЛС обеспечивает предварительное преобразование принятого сигнала. Во-первых, осуществляет доведение уровня принятого сигнала до необходимого значения для успешной работы последующих узлов радиолокатора. Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки. В-третьих, обеспечивает предварительную селекцию полезного сигнала (сигнала, отраженного от цели) из сигналов помех, которые действуют одновременно с полезным сигналом.
После предварительного преобразования в приемнике сигнал поступает в систему обработки, в которой решаются задачи по выделению из принятого сигнала информации о цели. Система обработки в современных РЛС представляет собой цифровую вычислительную систему, подобную обычному компьютеру или совокупности компьютеров. Поэтому данный элемент РЛС часто еще называют цифровой системой обработки.
Необходимо заметить, совокупность алгоритмов, закладываемых в систему обработки, определяет возможности РЛС и качество решения задач радиолокационного приема радиолокатором. Часто говорят, что система обработки определяет «интеллект» РЛС. Хотя термин «интеллект», конечно же, применим только к человеку. Однако современные технологии позволяют создавать технические системы, например, роботы, обладающие искусственным интеллектом. Современный уровень разработки алгоритмов в РЛС таков, что термин «искусственный интеллект» вполне применим и к современным радиолокаторам.
Подробнее о радиолокационных системах, их применении и перспективах читайте в книге «Радиолокация для всех» (В.С. Верба, К.Ю. Гаврилов, А.Р. Ильчук, Б.Г. Татарский, А.А. Филатов / под редакцией члена-корреспондента РАН В.С. Вербы).