Радиолокация
Кроме телевидения и радиовещания, очень важное значение в нашей жизни имеет радиолокация. Радиолокация – это определение и обнаружение местоположения различных объектов при помощи радиоволн
Радиолокация широко распространена в радиосвязи. Радиолокация осуществляется при помощи прибора – радиолокатора (радара) (рис. 8).

Рис. 8. Радар (Источник)
В радарах антенны передающая и приемная соединены вместе, радиолокатор – это комбинация приемника и передающего устройства. Работает радиолокатор в импульсном режиме (рис. 9). 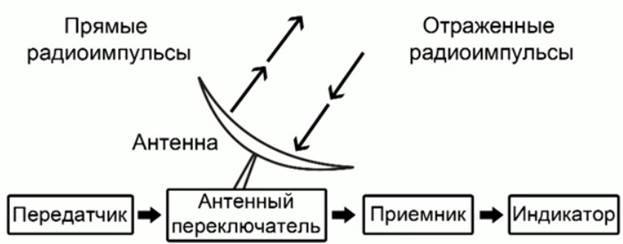
Рис. 9. Принцип работы радиолокатора (Источник)
Импульсный режим составляет одну миллионную секунды. Посылается сигнал – и радар автоматически переключается на прием этого сигнала, свойства работы радара основаны на том, что электромагнитная волна способна отражаться от поверхности. Вот этот отраженный сигнал радар и принимает в тот момент времени, когда он работает на прием. Расстояние до цели при помощи радара определяются по формуле, которую используют
при расчетах:
S = с · Δt / 2
В этой формуле представлено расстояние до цели (S), скорость электромагнитной волны (с) – величина постоянная и соответствует скорости в 300 000 км/с, время от момента подачи сигнала до момента приема сигнала, деленное пополам, так как сигнал идет до цели и обратно. Радиолокация используется не только на земле, но и в астрономии для обеспечения взаимосвязи между различными космическими телами и Землей. Определение расстояния до Луны было осуществлено с помощью радиолокатора. Был послан сигнал, получен отраженный сигнал, в результате чего уточнили расстояние от Земли до Луны.
Сегодня в астрономии радиолокация занимает свое особое место, радиоастрономия – это один из видов очень серьезных, быстроразвивающихся частей науки.
Дальность действия РЛС
Основная статья: Основное уравнение радиолокации
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, мощности излучаемого сигнала, и чувствительности приёмника системы.
В общем случае без учёта потерь мощности в атмосфере, помех и шумов дальность действия системы можно определить следующим образом:
- Dmax=PnDaSaσ(4π)2Pn.min4{\displaystyle D_{max}={\sqrt{\frac {P_{n}D_{a}S_{a}\sigma }{\left(4\pi \right)^{2}P_{n.min}}}}},
где:
- Pn{\displaystyle \;P_{n}} — мощность генератора;
- Da{\displaystyle \;D_{a}} — коэффициент направленного действия антенны;
- Sa{\displaystyle \;S_{a}} — эффективная площадь антенны;
- σ{\displaystyle \;\sigma } — эффективная площадь рассеяния цели;
- Pn.min{\displaystyle \;P_{n.min}} — минимальная чувствительность приёмника.
При наличии шумов и помех дальность действия РЛС уменьшается.
Влияние помех
Работа нескольких РЛС в одном частотном диапазоне
На загруженных участках, где одновременно используются многочисленные РЛС (например, морские порты) вероятны совпадения частотных диапазонов. Это приводит к приему РЛС сигнала другой РЛС. В результате на экране появляются дополнительные точки, бросающиеся в глаза из-за своей геометрической правильности. Эффект может быть убран переходом на другую рабочую частоту.
Мнимое изображение
При отражении радиосигнала от массивного объекта возможно дальнейшее распространение к меньшим объектам с последующим отражением и попаданием в РЛС. Таким образом, путь, который прошел сигнал становится больше и на экране появляется мнимое изображение объекта, который на самом деле находится в другом месте
Такой эффект должен приниматься во внимание при нахождении вблизи крупных отражающих объектов, таких как мосты, гидротехнические сооружения и крупные суда.
Многократное отражение
При размещении РЛС на большом судне возможен эффект многократного отражения сигнала. Сигнал РЛС отражается от близкого объекта, частично попадает обратно в РЛС, а частично отражается от корпуса суда. Таких отражений может быть много, амплитуда при каждом отражении уменьшается и сигнал будет восприниматься до тех пор, пока не будет достигнута пороговая чувствительность приемника. На экране радара будут видны несколько уменьшающихся с каждым разом объектов. Расстояние между ними пропорционально расстоянию от РЛС до объекта.
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды.
Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
История развития радиолокации
Идея радиолокации возникла практически сразу после открытия радиоволн. В 1905 году сотрудник немецкой компании Siemens Кристиан Хюльсмейер создал устройство, которое с помощью радиоволн могло обнаружить крупные металлические объекты. Изобретатель предлагал устанавливать его на кораблях, чтобы они могли избегать столкновений в условиях плохой видимости. Однако судовые компании не заинтересовались новым прибором.

Несмотря на то что англичане вступили в «радарную» гонку позже американцев и немцев на финише они сумели обогнать их и подойти к началу Второй мировой войны с самой продвинутой системой радиолокационного обнаружения самолетов.
Уже в сентябре 1935 года англичане приступили к постройке сети радиолокационных станций, в состав которой перед войной уже входило двадцать РЛС. Она полностью перекрывала подлет к Британским островам со стороны европейского побережья. Летом 1940 года британскими инженерами был создан резонансный магнетрон, позже ставший основой бортовых радиолокационных станций, устанавливаемых на американских и британских самолетах.
https://youtube.com/watch?v=055tx9viDhE
Работы в области военной радиолокации велись и в Советском Союзе. Первые успешные эксперименты по обнаружению самолетов с помощью радиолокационных станций в СССР были проведены еще в середине 30-х годов. В 1939 году на вооружение РККА была принята первая РЛС РУС-1, а в 1940 году – РУС-2. Обе эти станции были запущены в серийное производство.
Сигналу РЛС с фазированной решеткой можно придавать любую необходимую форму, его можно перемещать в пространстве без изменения положения самой антенны, работать с разными частотами излучения. РЛС с фазированной решеткой гораздо надежней и чувствительней, чем радиолокатор с обычной антенной. Однако у подобных радаров есть и недостатки: большой проблемой является охлаждение РЛС с ФАР, кроме того, они сложны в производстве и дорого стоят.

Новые радиолокационные станции с фазированной решеткой устанавливаются на истребители пятого поколения. Эта технология используется в американской системе раннего предупреждения о ракетном нападении. Радиолокационный комплекс с ФАР будет установлен на новейший российский танк «Армата». Следует отметить, что Россия является одним из мировых лидеров в разработке радиолокаторов с ФАР.
Классификация

Мобильная РЛС «Противник-ГЕ»
По сфере применения различают:
- военные РЛС;
- гражданские РЛС.
По назначению:
- РЛС обнаружения;
- РЛС управления и слежения;
- панорамные РЛС;
- РЛС бокового обзора;
- РЛС следования рельефу местности (terrain-following radar)
- метеорологические РЛС;
- РЛС целеуказания;
- РЛС контрбатарейной борьбы;
- навигационная РЛС, НРЛС:
- РЛС обзора обстановки.
По характеру носителя:
- береговые РЛС;
- морские РЛС;
- бортовые РЛС;
- мобильные РЛС.
По характеру принимаемого сигнала:
- первичные, или РЛС с пассивным ответом;
- вторичные, или РЛС с активным ответом;
- совмещённые.
По методу действия:
- надгоризонтный радиолокатор;
- загоризонтный радиолокатор.
По диапазону волн:
- метровые;
- дециметровые;
- сантиметровые;
- миллиметровые.
Принцип радиотелефонной связи
Первую передачу информации на расстоянии осуществил русский ученый Александр Степанович Попов (рис. 1).
Рис. 1. Александр Степанович Попов (Источник)
Для этой цели А.С. Попов использовал известную всем азбуку Морзе. Именно ему удалось осуществить радиосвязь, то есть передачу информации при помощи электромагнитных волн. Она заключалась в том, что при помощи точек и тире сообщалась некая информация.
Чем же отличается телефонная радиосвязь от радиосвязи?
Радиотелефонной связью мы называем передачу информации, речи, музыки на большие расстояния при помощи электромагнитных волн. Принцип радиотелефонной связи заключается в следующем: в передающей антенне создается высокочастотный переменный электрический ток, этот ток вокруг передающей антенны создает переменное электромагнитное поле, которое распространяется в виде электромагнитных волн. Такая волна, попадая на приемную антенну, возбуждает в приемной антенне ток той же частоты, что и был произведен при излучении, и таким образом осуществляется радиосвязь, то есть при помощи электромагнитных волн. Для того чтобы обеспечить такую связь, нужны специальные устройства. Во времена А.С. Попова и Генриха Герца, который впервые осуществил излучение электромагнитной волны и ее прием, источники электромагнитных колебаний были очень слабы, и поэтому на большие расстояния электромагнитная волна распространяться не могла. Тем не менее А.С. Попову удалось осуществить связь на расстоянии более 70 километров.
В наше время радиосвязь осуществляется по всему земному шару, даже за его пределами. Вопрос с производством высокочастотных колебаний был решен в 1913 году, когда был создан генератор незатухающих электромагнитных колебаний (рис. 2).
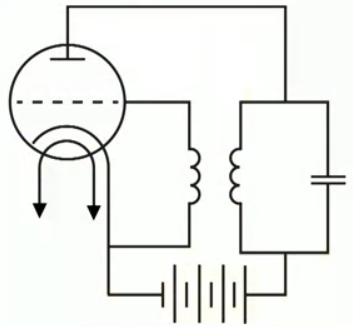
Рис. 2. Генератор незатухающих электромагнитных колебаний (Источник)
Главной частью генератора является трехэлектродная лампа – триод, которая состоит из трех частей: анод, сетка и катод. Вот такая лампа является основной частью любого генератора незатухающих колебаний.
Рассмотрим схему устройства передатчика электромагнитных волн или передающего устройства (рис. 3):
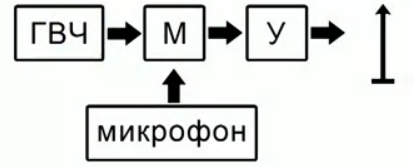
Рис. 3. Передатчик электромагнитных волн (Источник)
В первую очередь это генератор высокой частоты (ГВЧ), соединенный с модулятором (М), на который поступает звук от микрофона. В микрофоне механические колебания, звуковые колебания преобразуются в электрические колебания низкой частоты, и эти колебания от генератора высокой частоты и микрофона соединяются в модуляторе.
После усилителя (У) промодулированный сигнал поступает на передающую антенну, и уже этот сигнал выходит в эфир.
Слово «модуляция» означает «размеренность». Рассмотрим, как осуществляется модуляция в передающей части и из чего она состоит (рис. 4).
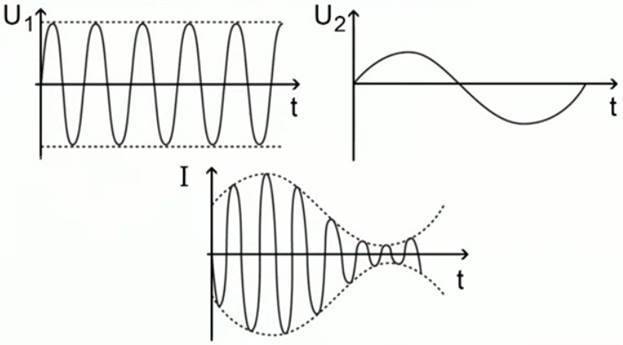
Рис. 4. Модуляция в передающей части (Источник)
На первой части рисунка изображены высокочастотные колебания, по вертикали расположено напряжение (U1), которое изменяется синусоидально и за очень маленький промежуток времени проходит очень много колебаний.
Вторая часть рисунка соответствует электрическим сигналам, которые поступают на модулятор от микрофона, это низкочастотные сигналы.
Когда в модуляции происходит объединение этих сигналов, мы наблюдаем высокочастотную составляющую, которая меняется по амплитуде в соответствии сигналам низких частот.
Этот процесс называется амплитудная модуляция.
Сегодня амплитудная модуляция – хорошо изученный и отработанный элемент, поэтому очень часто используется в радиосвязи, то есть когда мы слушаем радио, мы используем амплитудно-модулированный сигнал.
Существуют и другие способы модуляции: частотная модуляция или фазовая модуляция, они тоже нашли свое применение.
Диапазоны РЛС
Основная статья: Диапазон частот
| ОбозначениеIEEE / ITU | Этимология | Частоты | Длина волны | Примечания |
|---|---|---|---|---|
| HF | англ. high frequency | 3—30 МГц | 10—100 м | Радары береговой охраны, «загоризонтные» РЛС |
| P | англ. previous | > 1 м | Использовался в первых радарах | |
| VHF | англ. very high frequency | 50—330 МГц | 0,9—6 м | Обнаружение на больших дальностях, исследования Земли |
| UHF | англ. ultra high frequency | 300—1000 МГц | 0,3—1 м | Обнаружение на больших дальностях (например, артиллерийского обстрела), исследования лесов, поверхности Земли |
| L | англ. Long | 1—2 ГГц | 15—30 см | наблюдение и контроль над воздушным движением |
| S | англ. Short | 2—4 ГГц | 7,5—15 см | управление воздушным движением, метеорология, морские радары |
| C | англ. Compromise | 4—8 ГГц | 3,75—7,5 см | метеорология, спутниковое вещание, промежуточный диапазон между X и S |
| X | 8—12 ГГц | 2,5—3,75 см | управление оружием, наведение ракет, морские радары, погода, картографирование среднего разрешения; в США диапазон 10,525 ГГц ± 25 МГц используется в РЛС аэропортов | |
| Ku | англ. under K | 12—18 ГГц | 1,67—2,5 см | картографирование высокого разрешения, спутниковая альтиметрия |
| K | нем. kurz — «короткий» | 18—27 ГГц | 1,11—1,67 см | использование ограничено из-за сильного поглощения водяным паром, поэтому используются диапазоны Ku и Ka. Диапазон K используется для обнаружения облаков, в полицейских дорожных радарах (24,150 ± 0,100 ГГц). |
| Ka | англ. above K | 27—40 ГГц | 0,75—1,11 см | Картографирование, управление воздушным движением на коротких дистанциях, специальные радары, управляющие дорожными фотокамерами (34,300 ± 0,100 ГГц) |
| mm | 40—300 ГГц | 1—7,5 мм | миллиметровые волны, делятся на два следующих диапазона | |
| V | 40—75 ГГц | 4,0—7,5 мм | медицинские аппараты КВЧ, применяемые для физиотерапии | |
| W | 75—110 ГГц | 2,7—4,0 мм | сенсоры в экспериментальных автоматических транспортных средствах, высокоточные исследования погодных явлений |
Эстафета переходит в Германию
В 1904 году немец Христиан Хюльсмейер запатентовал устройство под названием телемобилоскоп. Этот прибор предполагалось использовать в судоходстве для обнаружения кораблей в условиях плохой видимости. Телемобилескоп был построен на основе искрового генератора радиоволн и в своей последней версии мог находить суда на расстоянии до 3 км. Однако устройством не заинтересовались ни гражданские, ни военные, предпочитая по старинке пользоваться на судах паровыми ревунами. По сути прибор Хюльсмайера был еще не радаром, а радиодетектором. Существовавшие на тот момент технологии еще не позволяли построить полноценный радиолокатор.
Схема установки антенны радиолокатора «Зеетакт» на немецкой подводной лодке
В 1920-1930-е годы немецкие ученые и инженеры достигли больших успехов в развитии военной радиолокации. В 1935 году физик Рудольф Кунхольд из Института технологий связи германских ВМС представил радиолокационный прибор с электронно-лучевым дисплеем. К концу 1930-х на его основе были созданы оперативные радиолокаторы «Зеетакт» для флота и «Фрейя» для ПВО.
Однако, несмотря на значительные научные результаты, руководство Третьего рейха рассчитывало на блицкриг и не спешило развивать национальную сеть радаров, считая их преимущественно оборонительными средствами. К 1940 году Германия располагала лишь небольшой сетью станций дальнего обнаружения. И только к концу 1943 года территорию Германии полностью накрыли защитным радиолокационным «колпаком».
Принцип действия
Радиолокация основана на следующих физических явлениях:
- Радиоволны рассеиваются на встретившихся на пути их распространения электрических неоднородностях (объектами с другими электрическими свойствами, отличными от свойств среды распространения). При этом отражённая волна, также, как и собственно, излучение цели, позволяет обнаружить цель.
- На больших расстояниях от источника излучения можно считать, что радиоволны распространяются прямолинейно и с постоянной скоростью, благодаря чему имеется возможность измерять дальность и угловые координаты цели (Отклонения от этих правил, справедливых только в первом приближении, изучает специальная отрасль радиотехники — Распространение радиоволн. В радиолокации эти отклонения приводят к ошибкам измерения).
- Частота принятого сигнала отличается от частоты излучаемых колебаний при взаимном перемещении точек приёма и излучения (эффект Доплера), что позволяет измерять радиальные скорости движения цели относительно РЛС.
- Пассивная радиолокация использует излучение электромагнитных волн наблюдаемыми объектами, это может быть тепловое излучение, свойственное всем объектам, активное излучение, создаваемое техническими средствами объекта, или побочное излучение, создаваемое любыми объектами с работающими электрическими устройствами.
Радар на борту
К идее использования радиолокационных средств на самолетах пришли несколько лет спустя после того, как появились первые наземные РЛС. Хотя в системах радионавигации и в приборах «слепой посадки» радиотехнические средства начали применяться уже с 1933 года.
В СССР именно наземная станция «Редут» явилась прототипом первой бортовой радиолокационной станции (БРЛС). Одной из основных проблем стало размещение аппаратуры на самолете – комплект станции с источниками питания и кабелями должен был весить примерно 500 кг. На одноместном истребителе того времени разместить такую аппаратуру было нереально. И выход был найден – разместить станцию было решено не на одноместном самолете, а на двухместном Пе-2.
РЛС «Коршун» на МиГ-17П
Первая отечественная бортовая радиолокационная станция была названа «Гнейс-2», и в июне 1943 года она была принята на вооружение. К концу 1944 года было выпущено более 230 станций «Гнейс-2».
А в победном 1945 году началось серийное производство самолетной радиолокационной станции «Гнейс-5с». Дальность обнаружения цели достигала 7 км. Но главной новинкой этой модификации было то, что начиная с дальности 1,5 км данные воздушной обстановки дублировались на специальном индикаторе, установленном в кабине летчика. Это позволяло пилоту самостоятельно выводить самолет в атаку.
Дальнейшее развитие бортовых РЛС было связано с появлением реактивной авиации. Обнаружить самолеты и крылатые ракеты врага помогали такие установки, как «Изумруд», «Сокол» и «Сапфир» в различных модификациях.
Как работает радиолокатор
Локацией называют способ (или процесс) определения месторасположения чего-либо. Соответственно, радиолокация – это метод обнаружения предмета или объекта в пространстве при помощи радиоволн, которые излучает и принимает устройство под название радиолокатор или РЛС.
Физический принцип работы первичного или пассивного радара довольно прост: он передает в пространство радиоволны, которые отражаются от окружающих предметов и возвращаются к нему в виде отраженных сигналов. Анализируя их, радар способен обнаружить объект в определенной точке пространства, а также показать его основные характеристики: скорость, высоту, размер. Любая РЛС – это сложное радиотехническое устройство, состоящее из многих компонентов.

В состав любого радара входит три основных элемента: передатчик сигнала, антенна и приёмник. Все радиолокационные станции можно разделить на две большие группы:
- импульсные;непрерывного действия.
Передатчик импульсной РЛС испускает электромагнитные волны в течение краткого промежутка времени (доли секунды), следующий сигнал посылается только после того, как первый импульс вернется обратно и попадет в приемник. Частота повторения импульса – одна из важнейших характеристик РЛС. Радиолокаторы низкой частоты посылают несколько сотен импульсов в минуту.
Антенна РЛС фокусирует электромагнитный сигнал и направляет его, также она улавливает отраженный импульс и передает его в приемник. Существуют радиолокаторы, в которых прием и передача сигнала производятся разными антеннами, они могут находиться друг от друга на значительном расстоянии. Антенна РЛС способна испускать электромагнитные волны по кругу или работать в определенном секторе. Луч радара может быть направлен по спирали или иметь форму конуса. Если нужно РЛС может следить за движущейся целью, постоянно направляя на нее антенну с помощью специальных систем.
В функции приемника входит обработка полученной информации и передача ее на экран, с которого она считывается оператором.
Кроме импульсных РЛС, существуют и радары непрерывного действия, которые постоянно испускают электромагнитные волны. Такие радиолокационные станции в своей работе используют эффект Доплера. Он заключается в том, что частота электромагнитной волны, отраженной от объекта, который приближается к источнику сигнала, будет выше, чем от удаляющегося объекта. При этом частота испускаемого импульса остается неизменной. Радиолокаторы подобного типа не фиксируют неподвижные объекты, их приемник улавливает лишь волны с частотой выше или ниже испускаемой.

Также радиолокационные станции можно разделить по длине и частоте волны, на которой они работают. Например, для исследования поверхности Земли, а также для работы на значительных дистанциях используются волны 0,9—6 м (частота 50—330 МГц) и 0,3—1 м (частота 300—1000 МГц). Для управления за воздушным движением применяется РЛС с длиной волны 7,5—15 см, а загоризонтные радары станций обнаружения ракетных пусков работают на волнах с длиной от 10 до 100 метров.
Примечания
- . TheFreeDictionary.com. Дата обращения 30 декабря 2015.
- Translation Bureau. . Public Works and Government Services Canada (2013). Дата обращения 8 ноября 2013.
- McGraw-Hill dictionary of scientific and technical terms / Daniel N. Lapedes, editor in chief. Lapedes, Daniel N. New York ; Montreal : McGraw-Hill, 1976. , 1634, A26 p.
- , с. 13.
- .
- Angela Hind. . BBC News (5 февраля 2007).
- ↑ .
- ↑ Справочник по радиоэлектронным системам / под ред. Б. В. Кривицкого. — М.: Энергия, 1979. — Т. 2. — С. 75—206. — 368 с.
- , с. 15—17.
Слюсар, В.И. . Разделы 9.3 – 9.8 в книге «Широкополосные беспроводные сети передачи информации». / Вишневский В.М., Ляхов А.И., Портной С.Л., Шахнович И.В. – М.: Техносфера. – 2005. C. 498 – 569 (2005).
Слюсар, В.И. . Электроника: наука, технология, бизнес. – 2001. – № 3. C. 42 – 46. (2001).
- Слюсар, В.И. (недоступная ссылка). Специальная техника и вооружение. – Февраль, 2002. – № 1,2. С. 17 – 23. (2002). Дата обращения 7 августа 2017.
- В. Г. Дождиков, Ю. С. Лифанов, М. И. Салтан ; под ред. В. Г. Дождикова. Энциклопедический словарь по радиоэлектронике, оптоэлектронике и гидроакустике / В. Г. Дождиков. — Москва: Энергия, 2008. — С. 600. — 611 с. — ISBN 978-5-98420-026-4 (В пер.).
Литература
- Поляков В. Т. Посвящение в радиоэлектронику. — М.: Радио и связь, 1988. — 352 с. — (МРБ. Выпуск 1123). — 900 000 экз. — ISBN 5-256-00077-2.
- Леонов А. И. Радиолокация в противоракетной обороне. — М.: Воениздат, 1967. — 136 с. — (Радиолокационная техника).
- Радиолокационные станции бокового обзора / Под редакцией А. П. Реутова. — М.: Советское радио, 1970. — 360 с. — 6700 экз.
- Радиолокационные станции воздушной разведки / Под редакцией Г. С. Кондратенкова. — М.: Воениздат, 1983. — 152 с. — 18 000 экз. — ISBN 200001705124.
- Мищенко Ю. А. Загоризонтная радиолокация. — М.: Воениздат, 1972. — 96 с. — (Радиолокационная техника).
- Бартон Д. Радиолокационные системы / Сокращённый перевод с английского под редакцией К. Н. Трофимова. — М.: Воениздат, 1967. — 480 с.
- Шембель Б. К. У истоков радиолокации в СССР. — М.: Советское радио, 1977. — 80 с.
- Водопьянов Ф. А. . Радиолокация. — М., 1946.
- Рыжов К. В. 100 великих изобретений. — М.: Вече, 2009. — 480 с. — (100 великих). — ISBN 5-7838-0528-9.
- Bowen, Edward George. Radar Days. — CRC Press, 1998. — ISBN 9780750305860.
- Центральная радиолаборатория в Ленинграде // Под ред. И. В. Бренёва. — М.: Советское радио, 1973.
- Военно-исторический музей артиллерии, инженерных войск и войск связи. Коллекция документов генерал-лейтенанта М. М. Лобанова по истории развития радиолокационной техники. Ф. 52Р оп. № 13
- Лобанов М. М. Из прошлого радиолокации: Краткий очерк. — М.: Воениздат, 1969. — 212 с. — 6500 экз.
- Лобанов М. М. Мы —— военные инженеры. — М.: Воениздат, 1977. — 223 с.
Лобанов М. М. Глава седьмая. О Совете по радиолокации при Государственном комитете обороны // Начало советской радиолокации. — М.: Советское радио, 1975. — 288 с.
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора.
В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток (англ. Azimuth Change Pulse, ACP) и метки Севера (англ. Azimuth Reference Pulse, ARP). За один оборот антенны РЛС генерируется 4096 масштабных азимутальных меток (для старых систем) или 16384 улучшенных масштабных азимутальных меток (англ. Improved Azimuth Change pulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а масштабные азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту.
Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С.
Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта масштабных азимутальных меток.
Классификация
Выделяют два вида радиолокации:
- Пассивная радиолокация основана на приёме собственного излучения объекта;
- При активной радиолокации радар излучает свой собственный зондирующий сигнал и принимает его отражённым от цели. В зависимости от параметров принятого сигнала определяются характеристики цели.
Активная радиолокация бывает двух видов:
Активная радиолокация с пассивным ответом
- С активным ответом — на объекте предполагается наличие радиопередатчика (ответчика), который излучает радиоволны в ответ на принятый сигнал. Активный ответ применяется для опознавания объектов (свой-чужой), дистанционного управления, а также для получения от них дополнительной информации (например, количество топлива, тип объекта и т. д.);
- С пассивным ответом — запросный сигнал отражается от объекта и воспринимается в пункте приёма как ответный.
Для просмотра окружающего пространства РЛС использует различные способы обзора за счёт перемещения направленного луча антенны РЛС:
- круговой;
- секторный;
- обзор по винтовой линии;
- конический;
- по спирали;
- «V» обзор;
- линейный (самолёты ДРЛО типа Ан-71 и А-50 (Россия) или американские с системой Авакс).
В соответствии с видом излучения РЛС делятся на:
- РЛС непрерывного излучения;
- Импульсные РЛС.
Первые советские радары
В 1920-е годы ученые в СССР создали импульсную радиолокационную установку и смогли с помощью отраженного радиосигнала измерить расстояние до ионосферы. В 1925 году физики Введенский, Симанов, Халезов и Аренберг указали на возможность применения для радиолокации ультракоротких радиоволн. А в 1934 году в Ленинграде начались первые полноценные опыты с аппаратурой радиообнаружения – в январе радиолокационным методом на расстоянии 600 метров был найден самолет, летящий на высоте 150 метров.
Оборудование было создано в Центральной радиолаборатории группой Ю.К. Коровина при поддержке Ленинградского электротехнического института. Руководил экспериментом военный инженер М.М. Лобанов, который сыграл ключевую роль в становлении радиолокационного направления в промышленности. В том же 1934 году на Ленинградском радиозаводе были выпущены опытные образцы радиолокационных станций (РЛС) «Вега» и «Конус» для системы радиообнаружения самолетов «Электровизор» ученого П.К. Ощепкова. Таким образом, 1934 год можно считать годом рождения первого отечественного радара.
РЛС дальнего обнаружения «РУС-2»
В 1938 году начинается серийное производство РЛС РУС-1 и РУС-2 «Редут», которые станут основой противовоздушной обороны в начале Великой Отечественной войны. Благодаря установленной на крейсере «Молотов» радиолокационной станции были отражены первые атаки немецких бомбардировщиков на Севастополь 22 июня 1941 года. А месяц спустя комплекс РУС-2, расположенный в 100 км от Москвы, обнаружил 200 самолетов, летящих бомбить столицу. Тогда атака была отражена, немцы развернулись, потеряв 22 машины.
В работе над первыми станциями РУС-1 принимал участие выдающийся физик А.А. Пистолькорс, создатель научной школы радиоэлектроники. Станция РУС-2 «Редут» выпускалась на заводе №339 и стала самой массовой РЛС времен войны.
Заключение
Мы рассмотрели принцип радиотелефонной связи, телевидения и радиолокацию. На следующем уроке обсудим свойства электромагнитных узлов.
Список литературы
- Тихомирова С.А., Яворский Б.М. Физика (базовый уровень) – М.: Мнемозина, 2012.
- Генденштейн Л.Э., Дик Ю.И. Физика 10 класс. – М.: Мнемозина, 2014.
- Кикоин И.К., Кикоин А.К. Физика-9. – М.: Просвещение, 1990.
Домашнее задание
- Дать определение радиотелефонной связи.
- Каков принцип работы радиотелефонной связи?
- Каков принцип работы радиолокатора?
Дополнительные рекомендованные ссылки на ресурсы сети Интернет
- Интернет-портал Ucheba-legko.ru (Источник).
- Интернет-портал All-he.ru (Источник).
- Интернет-портал Femto.com.ua (Источник).