Автоматизированные системы управления оборонного назначения
Автоматизированные системы управления войсками и боевыми средствами
Автоматизированные системы управления войсками «Универсал—1Э» — центральное звено АСУ КП тактического соединения ПВО. Обеспечивает создание автоматизированной ПВО района с размерами 1600×1600 км², до 100 км по высоте. Количество управляемых КП родов войск — до 16.
«Рубеж—МЭ» — АСУ истребительной авиационной части.
«Байкал—1Э» — комплекс средств автоматизации (КСА) командного пункта зенитной ракетной части, объединяет до 12 зенитных ракетных комплексов (ЗРК) малой, средней и большой дальности с пределами работы по дальности 1200 км и высоте 100 км, обеспечивает прием и обработку радиолокационной информации от нескольких источников, включая РЛС и управляемые ЗРК, целераспределение и целеуказание ЗРК и координацию их действий, количество одновременно управляемых стрельбовых каналов — до 144.
«Нива—Э» — комплекс средств автоматизации КП полка, бригады радиотехнических войск (РТВ), обеспечивает сбор информации о воздушных объектах в радиусе до 1600км от радиолокационных постов и подразделений, авиационного комплекса радиолокационного дозора и наведения А—50, обработку и выдачу информации на вышестоящий и обеспечиваемые КП зенитных ракетных войск (ЗРВ) и истребительной авиации (ИА), обеспечивает взаимодействие с КП соседних частей РТВ, центром организации воздушного движения (ОВД), количество одновременно сопровождаемых целей — до 240.
«Основа—1Э» — комплекс средств автоматизации КП радиотехнического подразделения, осуществляет сбор, обработку информации о воздушных объектах в радиусе до 1600 км от своих радиолокационных средств, радиолокационных постов, выдачу информации на вышестоящие и обеспечиваемые КП РТВ, ЗРВ, ИА, обеспечивает сопровождение до 120 объектов, в том числе постановщиков помех триангуляционным методом по данным пеленгов от радиолокационных постов и своих РЛС.
«Поле—МЭ» — комплекс средств автоматизации пункта управления радиолокационного поста, обеспечивает получение радиолокационной информации от своих РЛС в радиусе до 600 км, ее обработку и выдачу на КП РТВ, ЗРВ, пункт наведения. ■ В АСУ ПВО наряду с централизованным управлением, обеспечиваемым ее иерархическим построением, возможно децентрализованное управление за счет разветвленной сети «горизонтальных» связей КСА КП частей и подразделений родов войск. Автоматизированные системы управления боевыми средствами ■ Автоматизированные системы управления боевыми средствами (АСУ БС) управляют поиском целей и целераспределением с использованием данных собственных локационных средств и АСУВ. По существу, АСУ БС — это АСУ тактических звеньев войск. В отдельных случаях АСУ БС могут переходить в АСУ оперативных и стратегических звеньев. ■ АСУ БС ПВО разрабатываются в расчете на преимущественное применение в интересах территориальной ПВО, ПВО группировок сухопутных войск, ПВО военно—морских сил оснащённых зенитными ракетными системами различной дальности. ■ Зенитные ракетные комплексы — автоматизированные или автоматические системы управления пуском и полетом зенитных управляемых ракет. Зенитные ракетные системы — разрабатываются в расчете на преимущественное применение в интересах территориальной ПВО, ПВО группировок сухопутных войск, ПВО военно—морских сил, причем с различной дальностью действия. ■ Зоны поражения ЗРК, пуска ракет и постановки задач — осуществляется АСУ БС. Зоны поражения ЗРК, пуска ракет и постановки задач являются важнейшими характеристиками управления ЗРК, как автономного, так и централизованного. Дальние границы соответствующих зон называют рубежами. Разнос рубежей пуска и поражения связан с движением цели в течение полетного времени ракеты. Разнос рубежей постановки задач и пуска связан с движением цели за время отработки ЗРК задачи на пуск. С учетом времени отработки локационной информации в АСУ, времени, расходуемого на оценку обстановки, времени на целераспределение между ЗРК, времени на принятие решения командиром можно указать зоны и рубежи получения информации для АСУ БС и АСУВ. Ими определяются потребные дальности действия информационных локационных систем, работающих в интересах ЗРК. ■ К АСУ БС, например, относятся:
«Сенеж—М1Э» — комплекс средств автоматизации командного пункта зенитной ракетной части смешанного состава, предназначен для управления ЗРК и наведения до 6 истребителей—перехватчиков. Пределы работы по дальности 1600 км и высоте 40 км.
[править] Диапазоны РЛС
| Диапазон | Этимология | Частоты | Длина волны | Примечания |
|---|---|---|---|---|
| HF | англ. high frequency | 3—30 МГц | 10—100 м | Радары береговой охраны, «загоризонтные» РЛС |
| P | англ. previous | < 300 МГц | > 1 м | Использовался в первых радарах |
| VHF | англ. very high frequency | 50—330 МГц | 0,9—6 м | Обнаружение на больших дальностях, исследования Земли |
| UHF | англ. ultra high frequency | 300—1000 MHz | 0,3—1 м | Обнаружение на больших дальностях (например, артиллерийского обстрела), исследования лесов, поверхности Земли |
| L | англ. Long | 1—2 ГГц | 15—30 см | наблюдение и контроль за воздушным движением |
| S | англ. Short | 2—4 ГГц | 7,5—15 см | управление воздушным движением, метеорология, морские радары |
| C | англ. Compromise | 4—8 ГГц | 3,75—7,5 см | метеорология, спутниковое вещание, промежуточный диапазон между X и S |
| X | 8—12 ГГц | 2,5—3,75 см | управление оружием, наведение ракет, морские радары, погода, картографирование среднего разрешения; в США диапазон 10,525 ГГц ± 25 МГц используется в РЛС аэропортов | |
| Ku | англ. under K | 12—18 ГГц | 1,67—2,5 см | картографирование высокого разрешения, спутниковая альтиметрия |
| K | нем. kurz — «короткий» | 18—27 ГГц | 1,11—1,67 см | использование ограничено из-за сильного поглощения водяным паром, поэтому используются диапазоны Ku и Ka. Диапазон K используется для обнаружения облаков, в полицейских дорожных радарах (24,150 ± 0,100 ГГц). |
| Ka | англ. above K | 27—40 ГГц | 0,75—1,11 см | Картографирование, управление воздушным движением на коротких дистанциях, специальные радары, управляющие дорожными фотокамерами (34,300 ± 0,100 ГГц) |
| mm | 40—300 ГГц | 1—7,5 мм | миллиметровые волны, делятся на два следующих диапазона | |
| V | 40—75 ГГц | 4,0—7,5 мм | медицинские аппараты КВЧ, применяемые для физиотерапии, а также аппараты для диагностики (например, по методу Фолля) | |
| W | 75—110 ГГц | 2,7—4,0 мм | сенсоры в экспериментальных автоматических транспортных средствах, высокоточные исследования погодных явлений |
ФОРМУЛА ИЗОБРЕТЕНИЯ
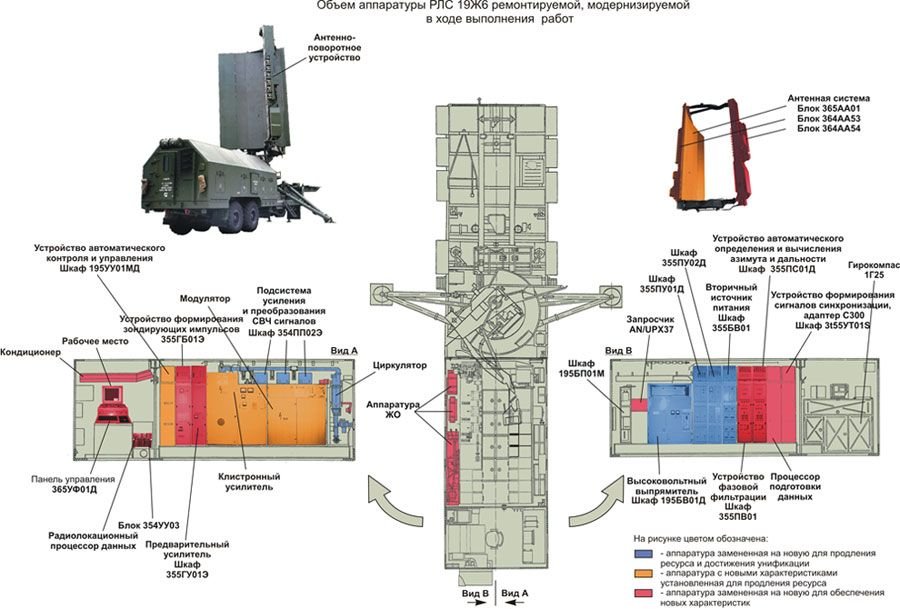
Подвижная наземная двухкоординатная радиолокационная станция (РЛС) кругового обзора метрового диапазона волн, представляющая собой взаимосвязанный комплекс функциональных и конструктивных технических средств обеспечения потребительского уровня РЛС и включающая перестраиваемое в полосе частот приемопередающее устройство в составе твердотельного монопередатчика, двух формирователей зондирующих сигналов и приемника основного канала, основную антенну с датчиком угла ее поворота, устройство компенсации шумовых активных помех, включающее компенсационную антенну, приемник компенсационного канала и автокомпенсатор, устройство первичной обработки радиолокационных сигналов, состоящее из двух блоков обнаружения сигналов дальней и ближней зон, коммутатора сигналов, блока подавления сигналов, принятых по боковым лепесткам диаграммы направленности основной антенны, блока пеленга постановщиков активных помех и блока измерения координат, устройство вторичной обработки радиолокационной информации и сопряжения, устройство отображения, управления и контроля, причем выходы двух формирователей зондирующих сигналов соединены с двумя входами твердотельного монопередатчика, выход которого соединен со входом основной антенны, первый выход которой соединен со входом приемника основного канала, выход которого соединен со входом блока пеленга постановщиков активных помех и с первым входом автокомпенсатора, второй, третий и четвертый входы которого соединены с тремя выходами приемника компенсационного канала, четыре входа которого соединены с четырьмя выходами компенсационной антенны, а пятый его вход соединен со вторым выходом основной антенны, выход автокомпенсатора через параллельно соединенные блоки обнаружения сигналов дальней и ближней зон соединен, соответственно, с первым и вторым входами коммутатора сигналов, выход которого соединен с входом блока подавления сигналов, принятых по боковым лепесткам диаграммы направленности основной антенны, выход которого соединен с первыми входами блока измерения координат и устройства отображения, управления и контроля, второй и третий входы которого соединены, соответственно, с первым выходом блока измерения координат и вторым выходом блока пеленга постановщиков активных помех, первый выход которого соединен со вторым входом блока измерения координат, второй выход которого соединен с входом устройства вторичной обработки радиолокационной информации и сопряжения, выход-вход которого соединен с входом-выходом устройства отображения, управления и контроля, при этом для размещения аппаратуры РЛС используется кабина транспортного средства, разделенная шумопоглощающей стенкой с дверью на обитаемый отсек с рабочим метом оператора, содержащим устройство отображения, управления и контроля и устройство вторичной обработки радиолокационной информации и сопряжения, и аппаратный отсек с аппаратным шкафом, содержащим приемопередающее устройство, устройство первичной обработки радиолокационных сигналов, приемник компенсационного канала и автокомпенсатор шумовых активных помех и конструктивно сопряженным с оснащенным холодильной установкой оборудованием приточно-вытяжного воздушного охлаждения, расположенным под днищем кабины и обеспечивающим охлаждение аппаратуры шкафа и вентиляцию обитаемого отсека кабины.
Разведчик не пройдет!
Осенью 2017 года пресс-служба Западного военного округа сообщила, что РЛС «Небо-УМ» в рамках гособоронзаказа получили два радиотехнических полка округа, дислоцированные в Ленинградской области и Карелии. Год спустя боевые возможности округа по контролю воздушного пространства в южной части Центральной России возросли после того, как «Небо-УМ» появилась в дивизии противовоздушной обороны в Воронежской области. Новая РЛС поступила и в Восточный и Центральный военные округа, усилен контроль воздушного пространства в арктической зоне.
О существенном пополнении войск этой новинкой говорит и тот факт, что еще в мае 2017-го Минобороны РФ заключило контракт на поставку одиннадцати станций «Небо-УМ» до конца 2019 года. Нынешнее заступление на боевое дежурство РЛС в Ростовской области — подтверждение успешного внедрения новинки в эксплуатацию. Ее уже успели оценить те, кому работать на станции.
Остается добавить, что появление РЛС «Небо-УМ» — неприятный сюрприз для новейших американских истребителей F-35, равно как и для F-22 Raptor. Так, в частности, считают китайские эксперты, в целом охарактеризовавшие российскую систему ПВО как очень «плотную и надежную».
«Небо-УМ» стала еще одним звеном в этом сплошном радиолокационном поле. С учетом того, что эта РЛС наряду с другими («Подлет», «Сопка-2», «Контейнер», «Гармонь»), дислоцируется во всех военных округах, созданы условия для успешного перехвата любой воздушной цели и ее поражения ракетными комплексами.
Кстати, как сообщил в недавнем интервью «Красной звезде» начальник радиотехнических войск ВКС России генерал-майор Андрей Кобан, в 2020 году дежурными силами РТВ обнаружено и проведено более 2 млн воздушных объектов, выявлено свыше тысячи фактов полета иностранных самолетов-разведчиков у границ РФ, что примерно на 40 процентов больше, чем в 2019 году. Как говорится, работы хватает!
…Новая РЛС «Небо-УМ» — это очередной шаг по повышению качества контроля воздушного пространства России и прилегающей территории. Радиотехнические войска теперь «видят» дальше и решения принимаются быстрее — это нужно иметь в виду тем, кто любит близко подходить к границам России.
Бомбардировочные БРЛС
| Литерное обозначение | Шифр ОКР | Заводское обозначение | Индекс | Децимальный номер | Тип | Применение | Статус |
|---|---|---|---|---|---|---|---|
| 2БС1 | радиолокационная станция | Ил-38 (в составе системы ППС “Беркут-38”) | |||||
| 2БС1-Э | радиолокационная станция | Ил-38 (в составе системы ППС “Беркут-38-Э”) | |||||
| 2КНI | 1.000.086 | радиолокационная станция | Ту-142МК (в составе системы ППС “2Коршун-К”) | ||||
| 2КНI-Э | 1.000.086 | радиолокационная станция | Ту-142МЭ (в составе системы ППС “2Коршун-К-Э”) | ||||
| ЕН | радиолокационная станция | Ту-16К-10 (в составе системы К-10У), Ту-104Ш | |||||
| ЕН-2-6 | радиолокационная станция | Ту-16К-10Н | |||||
| ЕН-Д (ЕН-М) | радиолокационная станция | Ту-16К-10Д | |||||
| ЕН-Р | радиолокационная станция | Ту-16РМ-1 | |||||
| К-1 | Кобальт | радиолокационная станция | Ту-4 (в составе РЛС “Рубидий”) | ||||
| К-1М | Кобальт-М | радиолокационная станция | Ту-4, Ту-4КС, Ту-16КС (в составе СУВ К-3) | ||||
| КННI | радиолокационная станция | Ту-142МЗ (в составе системы ППС “Коршун-Н”) | |||||
| ПН | радиолокационная станция | Ту-22К (в составе системы К-22У) | |||||
| ПНА | радиолокационная станция | Ту-22М2 (в составе системы “Планета”), Ту-104Ш-2, Ту-134СЛ | |||||
| ПНА-Б | радиолокационная станция | Ту-95К-22 (в составе системы “Кама”) | |||||
| ПНА-Д | радиолокационная станция | Ту-22М3 (в составе системы “Планета”) | |||||
| ПСБН | радиолокационная станция | Бе-6, Ил-28, Ту-83, Ту-86 | |||||
| ПСБН-М | 8 | радиолокационная станция | Бе-6М, Ил-28, Ил-28Т, Ту-14, Ту-14Т, Ту-81 | ||||
| ПСБН-М15 | радиолокационная станция | Ил-46 | |||||
| ПСБН-МА | радиолокационная станция | Як-26 | |||||
| Рубидий | радиолокационная станция | Ту-4 | |||||
| Рубидий-М-85 | радиолокационная станция | Ту-85 | |||||
| РБП-2 | Рубидий-ММ | радиолокационная станция | Ан-12, Ту-16, Ту-95, Ту-116 | ||||
| РБП-3 | радиолокационная станция | Ан-8, Ан-10, Ан-12 | |||||
| РБП-4 | Рубидий-ММ-2 | радиолокационная станция | М-4, Ту-16, Ту-16А, Ту-16КС, Ту-16Р, Ту-16С, Ту-16Т, Ту-95 | ||||
| РБП-4Г | радиолокационная станция | Ту-16 | |||||
| РБП-6 | Люстра | радиолокационная станция | |||||
| РДС | радиолокационный дальномер | ||||||
| СВР-1 | радиолокационная станция | А-57 | |||||
| СПРС-1 | Курс | радиолокационная станция | Р-1, Р-2, Ил-28, Ми-4М, Ту-91, Як-25МР | ||||
| Курс-Л | радиолокационная станция | Бе-10 | |||||
| Курс-М | радиолокационная станция | Бе-10, Ил-28Р, Ми-4М | |||||
| ЯД | 20 | радиолокационная станция | Ту-95К | ||||
| Инициатива-1 | радиолокационная станция | ||||||
| Инициатива-1Ш | радиолокационная станция | Ту-134Ш-2 | |||||
| Инициатива-2 | радиолокационная станция | Ан-8М, Ту-124Ш-2, Ту-134Ш-2 | |||||
| И-2Б | Инициатива-2Б | радиолокационная станция | Бе-12 (в составе ППС-12), Бе-14 | ||||
| Инициатива-2БН | радиолокационная станция | Бе-12Н (в составе ППС-12Н) | |||||
| И-2К | Инициатива-2К | радиолокационная станция | Ка-25ПЛ (в составе ППС “Байкал”) | ||||
| Инициатива-2КМ | радиолокационная станция | Ка-27ПЛ (в составе ППС “Осьминог-ПЛ”) | |||||
| Инициатива-2М | радиолокационная станция | Ми-14ПЛ (в составе ППС “Кальмар”) | |||||
| Инициатива-2Р | радиолокационная станция | Як-28Р | |||||
| Инициатива-2Я | радиолокационная станция | Як-28И | |||||
| Инициатива-3 | радиолокационная станция | Як-28Р | |||||
| Инициатива-4 | радиолокационная станция | Ан-12БК | |||||
| Инициатива-4-100 | радиолокационная станция | Ан-22 (в составе ПНК-1) | |||||
| Инициатива-И | радиолокационная станция | Ту-128Б | |||||
| Кинжал | У004 | радиолокационная станция | Т8М | ||||
| Кобальт | радиолокационная станция | Ту-4 (в составе РЛС “Рубидий”) | |||||
| Кобальт-М | радиолокационная станция | Ту-4 | |||||
| Обзор-К | У008 | АВ1.000.102 | радиолокационная станция | Ту-160 | |||
| Обзор-МР | радиолокационная станция | Ту-22МР | |||||
| Обзор-МС | У009 | АВ1.000.103 | радиолокационная станция | Ту-95МС | |||
| Поиск | радиолокационная станция | Ту-95МС, Ту-160 | |||||
| Орион-А | радиолокатор переднего обзора | Су-24 (в составе ПНС-24), Су-24М (в составе ПНС-24М) | |||||
| Ротор-Р | радиолокационный дальномер | ||||||
| Р-1 | Рубин-1 | радиолокационная станция | Ту-16А, Ту-16КСР, Ту-16РМ-2 | ||||
| Рубин-1А | радиолокационная станция | Ту-22, Ту-22Р, Ту-22П, Ту-22У, Ту-124Ш-1 | |||||
| Рубин-1В | радиолокационная станция | Ми-4МР, Ми-4ПС | |||||
| Рубин-1Д | радиолокационная станция | Ту-95МР | |||||
| Р-1К | Рубин-1К | радиолокационная станция | Ту-16КСР-2, Ту-16КСР-2А, Ту-16К-11-16 (в составе системы “Рубикон”) | ||||
| Рубин-1КВ | радиолокационная станция | Ту-16К-26, Ту-16КСР-2-5 (в составе системы “Взлет”), Ту-95М-5 (в составе системы “Волга”) | |||||
| Рубин-1М | радиолокационная станция | Ту-16КСР-2-5, Ту-16КСР-2-5-11 | |||||
| Рубин-1МЕ | радиолокационная станция | 3М-5 | |||||
| Рубин-1Ш | радиолокационная станция | Ту-134Ш-1 | |||||
| Тис | радиолокационная станция | СД-МБР | |||||
| Цезий | радиолокационный дальномер | Ту-4 (в составе РЛС “Рубидий”) | |||||
| Цезий-М | радиолокационный дальномер | ||||||
| Шпиль | радиолокационная станция | Бе-10Н (в составе системы К-12У) | |||||
| У006 | АВ1.000.101 | радиолокационная станция | Ту-22М3 | опытная |
Радиолокационная станция 55Ж6УМ «Ниобий»
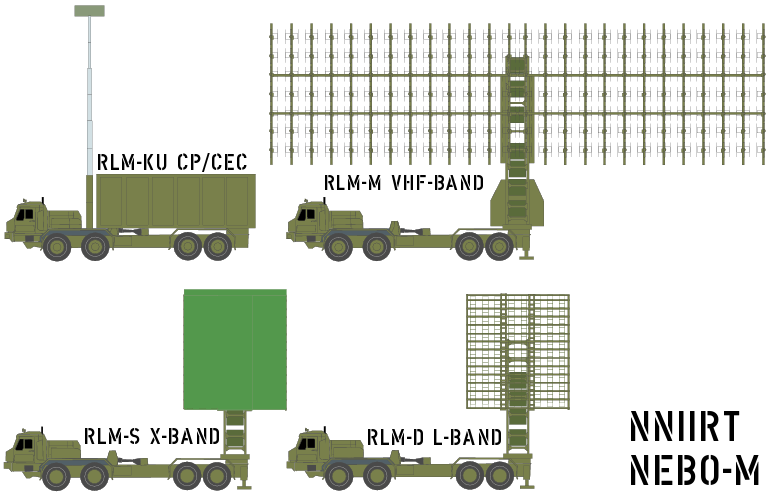
О ходе строительства новых РЛС сообщает выпуск заводской газеты Нижегородского машиностроительного завода «Нижегородский машиностроитель» от 19 декабря 2013 года. По данным издания, в прошлом году предприятие произвело девять комплектов радиолокационной станции «Небо-М», а также начало строительство серийных станций новой модели «Ниобий». Кроме того, в ближайшем будущем нижегородские специалисты примут участие в разработке отдельных элементов новых модификаций этих РЛС, а затем примутся за изготовление опытных образцов. План на прошлый 2013 год подразумевал изготовление двух комплектов РЛС «Ниобий». В новом 2014 году производство этих систем продолжится.






Радиолокационная станция 55Ж6УМ «Ниобий» представляет собой дальнейшее развитие систем семейства «Небо», разработка которых началась во второй половине восьмидесятых годов. РЛС «Ниобий» предназначена для наблюдения за воздушным пространством, обнаружения различных целей и определения их координат. По имеющимся данным, станция 55Ж6УМ способна находить и сопровождать как аэродинамические (самолеты, вертолеты, крылатые ракеты и т.д.), так и баллистические (боевые блоки ракет) цели. Аппаратура станции позволяет обнаруживать цель, определять ее координаты и государственную принадлежность и передавать информацию на командный пункт или зенитным комплексам. Кроме того, имеется возможность пеленговать источники помех и определять их местоположение.
Станция «Ниобий» является непосредственным развитием базового варианта РЛС «Небо-У» с изменением состава оборудования, выполненным на новой элементной базе. Проект новой радиолокационной станции разрабатывался Нижегородским научно-исследовательским институтом радиотехники. Проектная документация была подготовлена к 2010 году, после чего началось строительство опытного образца. В конце того же года первый экземпляр комплекса «Ниобий» прошел приемку заказчика, а в 2011-м стартовали его испытания.
Радиолокационная станция 55Ж6УМ состоит из нескольких модулей, устанавливаемых на колесном шасси. Это антенно-аппаратный комплекс, кабина управления с рабочими местами расчета и автономная система электроснабжения с собственными генераторами. После прибытия на позицию расчет радиолокационной станции производит развертывание технических средств и их подготовку к работе. В некоторых рекламных материалах содержится неоднозначная информация о времени развертывания: указанное время около 5 минут выглядит сомнительным. Для сравнения, на развертывание станции «Небо-У» требуется более 20 часов. Вероятно, в рекламные материалы по РЛС «Ниобий» вкралась ошибка, из-за чего реальное время подготовки систем в разы превышает указанное.
В составе антенно-аппаратного комплекса РЛС «Ниобий» имеется антенна с активной фазированной решеткой, обеспечивающая комплексу высокие характеристики. РЛС «Ниобий» может контролировать воздушное пространство в радиусе от 10 до 600 километров без ограничений по азимуту. Максимальная высота обнаружения цели – 80 км при угле места от 0° до 30°. При досопровождении цели максимальный угол места увеличивается до 50°. Максимальная скорость цели, при которой возможно ее обнаружение и сопровождение, 8000 км/ч. Для обеспечения высоких характеристик обнаружения высотомер и дальномер станции работают в разных диапазонах, в метровом и дециметровом соответственно.
Условная цель с эффективной площадью рассеяния 1 кв.м., летящая на высоте 30 км может быть обнаружена на расстоянии до 430 километров. Электроника станции «Ниобий» имеет разрешающую способность по дальности до 500 метров и по направлению на цель до 5,4°. Среднеквадратическая ошибка по дальности для цели с ЭПР 1 кв.м равняется 80 метрам, по азимуту – 15 минут. Производительность электронного оснащения позволяет одновременно вести до 200 трасс. Темп выдачи информации – 10 с.
В производстве радиолокационных станций 55Ж6УМ «Ниобий» участвуют несколько организаций. Окончательную сборку осуществляет Нижегородский машиностроительный завод. Часть комплектующих производят смежные предприятия. К примеру, новосибирский завод «Электроагрегат» весной 2013 года начал производство систем энергоснабжения для новой РЛС. Подобная совместная работа будет продолжаться в течение нескольких следующих лет.
В ближайшем будущем производство серийных радиолокационных станций семейства «Небо», в том числе «Ниобий», продолжится. В течение ближайших лет вооруженные силы получат несколько комплектов РЛС различных модификаций.
По материалам сайтов:http://jscnmz.ru/http://nniirt.ru/http://aex.ru/










http://militaryrussia.ru/blog/topic-618.html
Слайд 78Радиолокация – сегодняСТАНЦИЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙДЛЯ ЗПРК «ПАНЦИРЬ-С1»РЛС обнаружения цели (2010
г.) Трехкоординатная станция предназначена для обнаружения воздушных целей, определения их координат и передачи радиолокационной информации ее потребителям. Данная РЛС может входить в состав российский самоходный зенитный ракетно-пушечный комплекс (ЗРПК) наземного базирования Панцирь-С1. Уникальность данной РЛС заключается в способности обнаружения низколетящих целей на высоте от 5 метров над землей, на дальности в 130 при эффективной поверхности рассеянивания (ЭПР) цели в 1 м/кв и коло 70 при 0,1 м/кв. таким образом, ЗРК в составе с данной мобильной РЛС сможет сбивать цели типа стелс, крылатые ракеты и управляемые боеприпасы еще на подходе в 70 км зону.

Типовые сценарии применения НРЛС «Репейник»
Разведывательная группа, убедившись стационарными средствами обнаружения в отсутствии БпЛА противника в секторе прохода ЛБС, пересекает ЛБС и на расстоянии середины дистанции маршрута разворачивает НРЛС Репейник, продолжая дальнейший маршрут и выполнение задания. Станция закрывает небо в диаметре 20 км или на расстоянии 10 км в каждую сторону маршрута следования от места установки. Вся информация о воздушной обстановке транслируется на планшеты бойцов группы. При обнаружении на маршруте следования БпЛА противника, разведывательная группа принимает решение о принятии мер дополнительной маскировки для не привлечения внимания БпЛА или подавлении обнаруженного БпЛА переносными модулями РЭБ.
Штурмовая группа, развернув на ЛБС станцию и убедившись в отсутствии БпЛА противника в секторе, пересекает ЛБС и продолжает дальнейший маршрут, выполняя боевой выход. Станция закрывает небо в диаметре 20 км или радиусом сектора 10 км от места установки. Вся информация о воздушной обстановке транслируется на планшеты бойцов группы с переносными комплексами РЭБ. При обнаружении БпЛА противника, бойцы группы подавляют обнаруженные БпЛА переносными модулями РЭБ или активирует быстро разворачиваемые автоматические турели РЭБ.
На ЛБС разворачивается одна или несколько станций с включенным режимом скрытия тыловой обстановки для исключения сопровождения взлетающих в тылу дружественных БпЛА. При необходимости, станции периодически перемещаются вдоль ЛБС для обеспечения живучести. Силами разведывательных групп за ЛБС на нейтральной территории скрытно устанавливаются замаскированные автоматические турели РЭБ, соединенные беспроводным методом в единую интрасеть со станциями. Вся информация о воздушной обстановке, установленных автоматических турелях РЭБ и местонахождении бойцов охранения с переносными комплексами РЭБ транслируется в ситуационный центр. При обнаружении БпЛА противника, оператор ситуационного центра подавляет обнаруженные БпЛА с помощью автоматических турелей РЭБ или выдавая данные азимута и высоты в ближайшие к цели переносные средства РЭБ у бойцов.
В противоположных частях объекта (не более 10 км) разворачивается одна или две станции, а также автоматические турели РЭБ, соединенные в единую интрасеть со станциями. Вся информация о воздушной обстановке, установленных автоматических турелях РЭБ и местонахождении охраны с переносными комплексами РЭБ транслируется в ситуационный центр объекта. При обнаружении нарушающего режимность объекта БпЛА, оператор ситуационного центра подавляет обнаруженные БпЛА с помощью автоматических турелей РЭБ или выдавая данные азимута и высоты в ближайшие к цели переносные средства РЭБ у бойцов.
Общие рекомендации более эффективного применения:
- автоматизированные турели РЭБ рекомендуется устанавливать между местом разворачивания станции и точкой выполнения задания
- выставлять угол места станции в соответствии со складками местности
- НРЛС Репейник и автоматические турели РЭБ возможно объединять многофункциональным интерфейсом в единую систему
- планшет отображения воздушной обстановки возможно применять для ориентирования на местности
| Тип цели | ЭПР, кв.м | Обнаружение, м | Подавление, м |
|---|---|---|---|
| БпЛА типа DJI Phantom, DJI Mavic | 0,01 | 2 000 | 1 200 |
| БпЛА типа DJI Matrice 300 RTK | 0,1 | 2 700 | 1 400 |
| БпЛА типа Байрактар ТБ2 | 1 | 4 500 | 1 500 |
| Объекты с ЭПР 10 кв.м | 10 | 10 600 | 1 500 |
| Наименование параметра | Величина |
|---|---|
| Инструментальная дальность, км | 15 |
| Время развертывания, минут | 5 |
| Количество одновременно сопровождаемых целей | 256 |
| Тип антенной решетки | ФАР |
| Частотный диапазон, ГГц | X (9,2 – 9,5) |
| Сектор сканирования, град | 360 |
| Угол места, град | 20 |
| Темп выдачи информации, с | 2,5 |
| Излучаемая мощность, Вт | 2 |
| Потребляемая мощность, Вт | 65 |
| Питание, В | ~220/12 |
| Возможность объединения в единую сеть нескольких станций | Да |
| Интеграция с системами подавления (РЭБ) | Да |
| Габаритные размеры (Д×Ш×В), м | 0,3×0,46×0,65 |
| Диапазон рабочих температур, град | от -20 до +50 |
| Масса (нетто) радиолокационной станции, кг | 25,5 |
Слайд 84Радиолокация – завтраСверхширокополосная радиолокацияВ сверхширокополосной (СШП) радиолокации для повышения информативности радара
используются зондирующие сигналы очень короткой длительности или со сверхширокой полосой частот.Благодаря высокой разрешающей способности сигналов, применяемых в СШП радиолокации, точность получаемой пространственной информации о целях достигает единиц сантиметров.Возрастание разрешающей способности СШП радара позволяет увеличить количество информации о цели и перейти к получению ее радиоизображения.
Области применения сверхширокополосных радаров:• медицина (биометрические измерения человека и животных);• охранные системы;• системы безопасности;• системы спасения людей в завалах;• обнаружение людей за препятствиями;• контроль железнодорожного транспорта на сортировочных станциях;• контроль воздушного транспорта в ущельях;• СШП радиолокаторов для исследования эмоционального состояния человека по вариабельности сердечного ритма.